since 2003
イレコナビ サイトマップ
| 構え | ||
| 気態用 | 液態用 | 固態用 |
| 四つ足の構え | |||||||||
| 基本動作 | 装飾動作 | 少年部 | |||||||
| モード | 遷移 | 出方 | 入り方 | 手・腕 | 頭・首 | 胴体 | 足・脚 | 緩急 | |
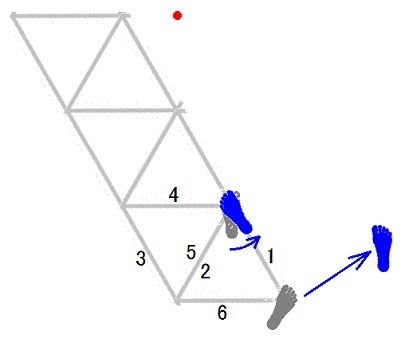
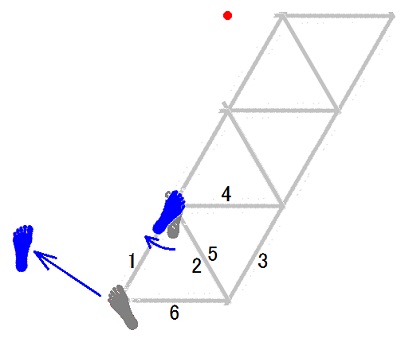
順回転ホバーから出るP1K1は、逆回転ホバーから出るP5K2とほとんど同じですが、敵の存在方向が少し違い、また、左足と右足のどちらを前足にするかが違います。
順回転ホバーから出るP1K1の着地姿勢は、逆回転ホバーから出るP2K1の着地姿勢と同じです。
| 胴の向き=右 | 胴の向き=左 | ||
| 足 の 位 置 と 向 き |
A F S 基 本 姿 勢 |
 |
 |
| A F S 上 起 姿 勢 |
|||
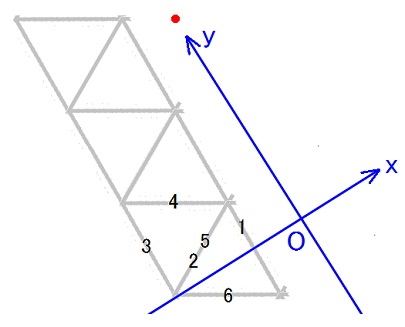
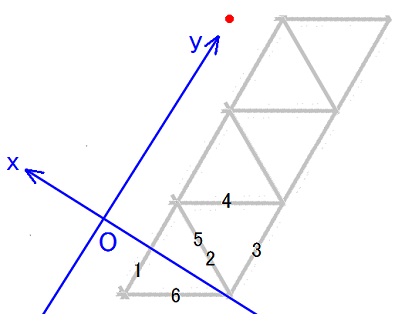
| A F S 姿 勢 の 座 標 軸 |
 |
 |
|
| 地面から離さない方の 足(の中指の中足趾節関節)の位置 |
(x, y) = (-0.5スネ, 0.5スネ) |
| AFS基本姿勢が完成するタイミング(打蹴技起動可能始)は、ホバー順回転の第6状態から第1状態への移行が完了した0.59秒後です。 |
各攻撃技のインパクトのタイミングの可能最早値(インパクト可能始)は、AFS基本姿勢が完成するタイミングよりも、各攻撃技の到達時間(起動からインパクトまでの時間)だけ遅い。
各攻撃技の到達時間は、今後の再測定によって更新される事が予想されるので、更新が有っても更新後の値が自動的に反映される様に、個別技のページの内容を以下に埋め込み表示しておきます。
| 独 立 式 縦 拳 直 打 |
|
| 連 動 式 短 前 直 打 |
|
| 連 動 式 長 前 直 打 |
私が第2状態に立った瞬間に自分の攻撃が当たるように敵が狙って来た場合、私が第1状態からH1*1で出れば、私のその行動は敵の裏をかいた形(逆を突く形)に成る。
第1状態の敵に近い方の足はパチンコの釘だ、というイメージです。
H1*1はそういう技なので、本当は、y軸を標的の元の位置に向けるんじゃなくて、もっと傾ける必要が有る。
だから、標的の元の位置がy軸上に有るものとして計算したリーチの不足量は、形式的な意味しか持たない、実際的な意味を持たない物に成っています。
それでも、このリーチの不足量も、参考には成ると思います。
第1状態からは、H1*1で出るという選択肢以外に、横切替で隣の区画でのホバーに移行するという選択肢も有ります。
---
| ポジショニング事典 | 敵が標的にする私の状態 | ||||||
| 第1状態 | 第2状態 | 第3状態 | 第4状態 | 第5状態 | 第6状態 | ||
| 敵の攻撃技 | AFS | KF11A | KF12A | KF13A | KF14A | KF15A | KF16A |
| BFS | KF11B | KF12B | KF13B | KF14B | KF15B | KF16B | |
| 蹴り | KF11K | KF12K | KF13K | KF14K | KF15K | KF16K | |
| タックル | KF11T | KF12T | KF13T | KF14T | KF15T | KF16T | |