since 2003
イレコナビ サイトマップ
| 構え | ||
| 気態用 | 液態用 | 固態用 |
| 四つ足の構え | |||||||||
| 基本動作 | 装飾動作 | 少年部 | |||||||
| モード | 遷移 | 出方 | 入り方 | 手・腕 | 頭・首 | 胴体 | 足・脚 | 緩急 | |
| 胴の向き=右 | 胴の向き=左 | |
| 足 の 位 置 と 向 き |
 |
 |
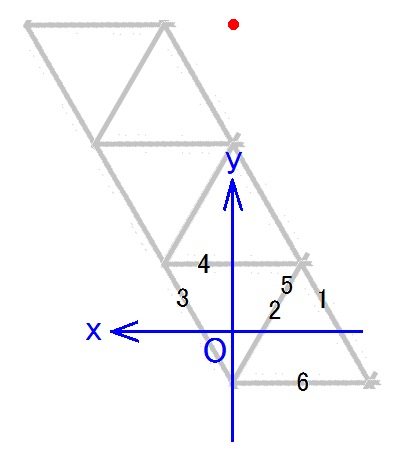
| A F S 基 本 姿 勢 の 座 標 軸 |
 |
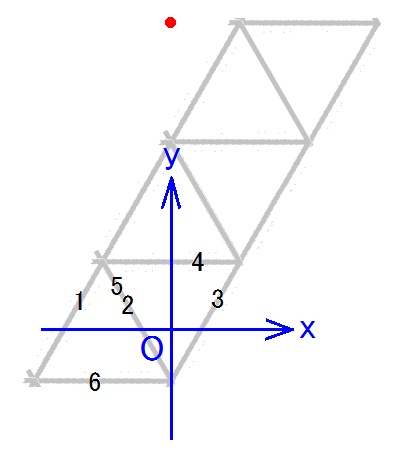 |
| 第4状態での両足(の中指の中足趾節関節)の位置 | (x, y) = (±0.5スネ, 0.5スネ) |
| AFS基本姿勢が完成するタイミング(打蹴技起動可能始)は、ホバー逆回転の第6状態から第5状態への移行が完了した0.42秒後です。 |
各攻撃技のインパクトのタイミングの可能最早値(インパクト可能始)は、AFS基本姿勢が完成するタイミングよりも、各攻撃技の到達時間(起動からインパクトまでの時間)だけ遅い。
各攻撃技の到達時間は、今後の再測定によって更新される事が予想されるので、更新が有っても更新後の値が自動的に反映される様に、個別技のページの内容を以下に埋め込み表示しておきます。
| 独 立 式 縦 拳 直 打 |
|
| 連 動 式 短 前 直 打 |
|
| 連 動 式 長 前 直 打 |
---
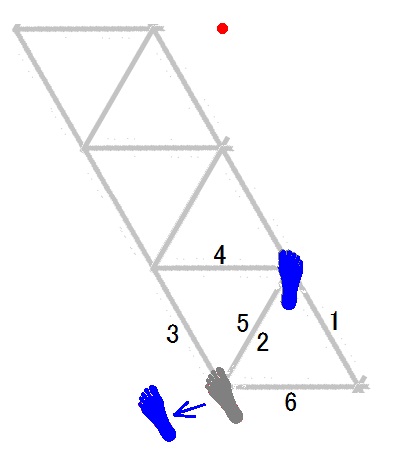
第4状態の私に連動式短前ストレート打ちを当てようとして失敗した敵にH5d2で返撃する事は、ホバー順回転から出るH3d2と同様です。
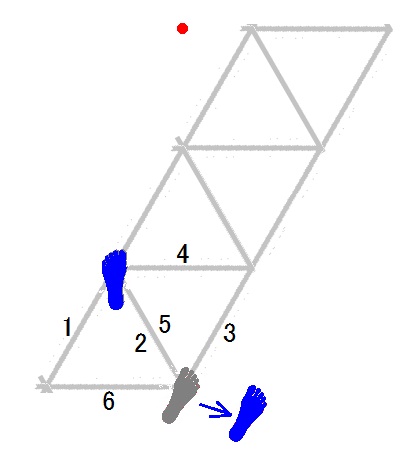
第3状態の私に連動式短前ストレート打ちを当てようとしている敵をH5d2で迎撃する事は、第5状態の私に連動式短前ストレート打ちを当てようとしている敵をホバー順回転から出るH3d2で迎撃する事と同様です。
---
ポジショニング・アナライザーを使った分析結果は以下です。
| ケース1 | ケース2 | ケース3 | ケース4 | ケース5 | ||
| 入 力 |
direction of x1 and x2 same(1) or opposite(-1)? | -1 | 1 | -1 | -1 | -1 |
| x1 of my part x1a=? | 0 | 0.08 | 0 | 0.08 | 0 | |
| y1 of my part y1a=? | 0.01 | 0.04 | 0.01 | 0.04 | 0.01 | |
| x2 of my part x2b=? | 0 | 0 | 0 | 0 | 0 | |
| y2 of my part y2b=? | 1.08 | 1.12 | 1.08 | 1.12 | 1.08 | |
| x2 of his part x2a=? | -0.03 | -0.03 | -0.04 | -0.03 | 0 | |
| y2 of his part y2a=? | 0.15 | 0.15 | 0.27 | 0.15 | -0.02 | |
| x1 of his home x1c= ? | -0.5 | 0.25 | 0 | 0.25 | -0.5 | |
| y1 of his home y1c/SQR(3)=? | 1.5 | 1.25 | 1 | 1.25 | 1.5 | |
| x2 of his home x2c=? | 0 | 0 | 0 | 0 | 0 | |
| angle of y1 tht1=? | 0 | 0 | 0 | 0 | 0 | |
| direction of x1 and x3 same(1) or opposite(-1)? | -1 | 1 | -1 | -1 | -1 | |
| x3 of my pole x3a=? | -0.5 | -0.5 | -0.5 | -0.5 | -0.5 | |
| y3 of my pole y3a=? | 0.5 | 0.5 | 0.5 | 0.5 | 0.5 | |
| x1 of my pole x1d=? | 0 | -0.25 | 0.5 | 0.75 | 0 | |
| y1 of my pole y1d/SQR(3)=? | 0.5 | 0.25 | 0 | 0.25 | 0.5 | |
| x3 of his part x3b=? | 0, -0.30, -0.5 | 0 | 0 | 0 | 0, -0.5 | |
| angle of y3 tht3=? | -23.1, -23.2 | -47.03173, -23.13298, 0 | ||||
| 出 力 |
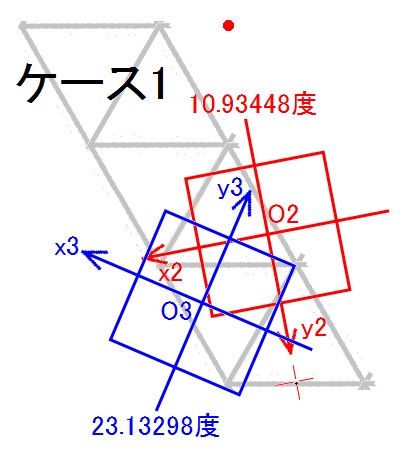
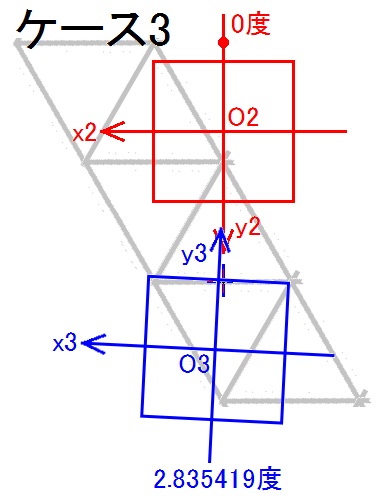
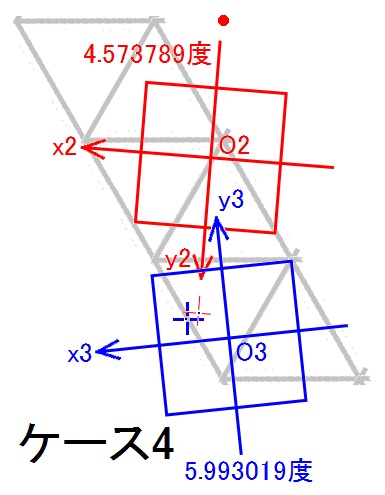
angle of -y2 tht2= | 10.93448 | -4.573789 | 0 | -4.573789 | 10.93448 |
| x1 of his part x1b= | -0.1469529 | 0.1274461 | 0.04 | 0.187255 | -0.2086548 | |
| y1 of his part y1b= | 0.9288062 | 1.009303 | 0.8200001 | 1.004519 | 1.090029 | |
| angle of y3 tht3= | 解なし(x3b=0), 解なし(x3b=-0.30), 66.86702(x3b=-0.5) |
13.31233 | -2.835419 | 5.993019 | 解なし(x3b=0), 42.96827(x3b=-0.5) |
|
| x3 of his part x3b= | -0.3401984(θ3=-23.1), -0.3401984(θ3=-23.2) |
0 | 0 | 0 | -0.1938717(θ3=-47.03173), -0.2201184(θ3=-23.13298), -0.2913452(θ3=0) |
|
| y3 of his part y3b= | 0.5000922(θ3=-23.1), 0.4998133(θ3=-23.2) |
0.973895 | 1.296241 | 1.127137 | 0.5000004(θ3=-47.03173), 0.6240195(θ3=-23.13298), 0.7240038(θ3=0) |
|
| my pole his part distance= | 0.1598017 | 0.688895 | 0.9402127 | 0.8020604 | 0.3061282 |
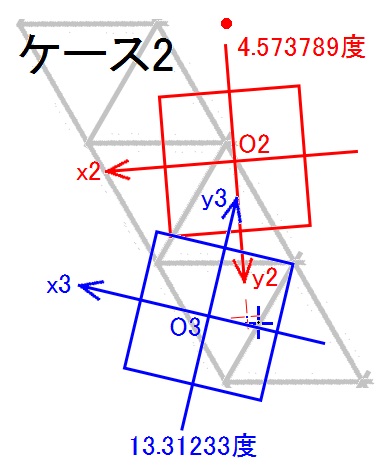
ケース2の図でy2軸がhis homeを通ってないのが何故か直ぐには良く分からない。
ケース1では、敵のアゴが私の前足の真上に近過ぎるので、y3軸の向きを幾ら変えても敵のアゴがy3軸の真上にある様に出来ない。
x3b=-0.30スネ(肘頂独立式長ストレート打ちの標的の最適位置)を指定しても、やはりθ3は「解なし」だった。
第6状態の私を狙って来た敵を攻撃するには、敵の頭部にヘッディングしたり肘フォアハンド打ちをするのが有望だと思われる。
θ3指定で調べてみると、θ3=-23.1度とθ3=-23.2度でx3bの値が最大(=絶対値が最小)に成る事が分かった。
my pole(私の前足)と敵のアゴ直下を結ぶ直線の傾きが66.86702度と出ているので、y3軸がこの直線に垂直なときにx3bの値が最大に成ると考えて、それはθ3 = 66.86702度 - 90度 = -23.13298度の時だと分かる。
写真を重ねて調べてみると、ヘディング、水平フォアハンド肘打ち、フォアハンド肘打ち上げのいずれも可能な位置関係である事が分かった。
ヘディングは右斜め前に向かって行なう。
ただし、水平フォアハンド肘打ちについてはストローク(起点から標的までの距離)が不十分である事が、カメラ用の三脚を標的にして確認したら分かった。
敵の顔と私の顔が非常に近いので、ヘディング以外では左手で逆側片目ガードを形成しておくなど、敵が私にヘディングする事への対策が必要。
私が独立式縦拳長前ストレート打ちで敵の下腹を打つ場合をケース5で調べてみた。
フォアハンド振り子打ちで右手背刀を敵の金的に当てる事も、出来るかどうか調べてみたい。
縦拳で下腹を打つ場合は、敵のズボンのベルトのバックルが邪魔に成るが、θ3 = 42.96827 - 90 = -47.03173の場合(x3bの絶対値が最小に成る場合)はリーチ的には適合している。
しかし、この角度では、私の右手指の第2関節が敵の下腹に当たってしまい、手指の付け根の関節を敵の下腹にめり込ませる事ができないだろう。
他の角度も調べてみたが、θ3=-23.13298では全然ダメってわけじゃないんだけど少しリーチ不足、θ3=0ではハッキリとリーチ不足、という結果が得られた。
ミゾオチならリーチ過大なので、ミゾオチと下腹の間にある部位に縦拳を当てる事は出来るだろうけど、この部位は腹筋がしっかりしていて独立式縦拳ストレート打ちでは打っても効果を期待できない。
ズボンのベルトのバックルの事からここまでを考え合わせて、独立式縦拳ストレート打ちは不採用とした。
金的打ちは、私が自分の右肩を敵の胸に着けて右手背刀で行なえば出来るかもしれないが、ハッキリとは分からない。
ケース1のやり方で敵を迎撃するには、私がまだ第6状態に居ると敵が予想している瞬間に既に私は第5状態から出ていなければいけなくて、そこまで敵の意表を突くのは無理だろうから、ケース1の用途は返撃だろう。
ケース1を返撃で使うなら、第6状態で敵のパンチが私の顔面に当たる寸前に私が上段両腕ガードを形成して敵のパンチをブロックしながら前に踏み込んで第5状態を経由してAFS上起姿勢に移行し、ガード腕の片方で肘打ちを行なう、という計画に成るだろう。
この計画なら、敵のパンチがフェイントでも連打でも困らない。
この場合、AFS上起姿勢のx軸=y3軸、AFS上起姿勢のy軸=x3軸です。



ケース1について以上の3つの写真と説明文を当ページに追加した結果を含む回のFTP完了日時は2026年04月21日昼12時50分26秒だと私のメモには記載されています。
2026年04月21日午前08時40分頃、陸上自衛隊の大分県日出生台演習場で、戦車の砲塔で砲弾が破裂し、乗っていた隊員4人のうち3人が死亡した、と書かれた新聞記事を見た。
カミオカンデの事故もポジショニング・アナライザーを含む記事の初回FTPの数時間前だったなあ。
| 敵が標的にする | 敵の攻撃技 | 私が標的にする | 私の攻撃技 | θ3 (度) |
ケ | ス 番 号 |
|||||||||
| 私の状態 (x1-y1-O1) |
私の身体部位 (x1a, y1a) (x2b, y2b) |
動き | エッヂ | 敵の姿勢 (x2-y2-O2) |
敵の身体部位 (x2a, y2a) (x1b, y1b) (x3b, y3b) |
動き | エッヂ | 時 | ||||||
| 胴 の 向 き |
状 態 番 号 |
x1 軸 の 向 き |
姿勢 | タイプ | 前足 | |||||||||
| 右 | 6 | 右 | 外八字立ち | アゴ | 連動式短前直打 | 右正拳 | AFS基本姿勢 | 左足 | アゴ | 前振水平打 | 右肘 | 返撃 | -23.13 | 1 |
| 前振打上 | 右肘 | |||||||||||||
| 顔 | ヘディング | 額 | ||||||||||||
| 金的 | 前振子打 | 右手背刀 | ||||||||||||
| 右 | 5 | 左 | レの字立ち | アゴ | 連動式短前直打 | 右正拳 | AFS基本姿勢 | 左足 | アゴ | 独立式縦拳長直打 | 右正拳 | 迎撃 | 13.31 | 2 |
| 右 | 4 | 右 | 外八字立ち | アゴ | 連動式短前直打 | 右正拳 | 連動式短前直打の終状態 | 左足 | アゴ | 連動式長前直打 | 右正拳 | 迎撃 | -2.84 | 3 |
| 右 | 3 | 右 | レの字立ち | アゴ | 連動式短前直打 | 右正拳 | AFS基本姿勢 | 左足 | アゴ | 連動式短前直打 | 左正拳 | 迎撃 | 5.99 | 4 |