since 2003
イレコナビ サイトマップ
| 構え | ||
| 気態用 | 液態用 | 固態用 |
| 四つ足の構え | |||||||||
| 基本動作 | 装飾動作 | 少年部 | |||||||
| モード | 遷移 | 出方 | 入り方 | 手・腕 | 頭・首 | 胴体 | 足・脚 | 緩急 | |
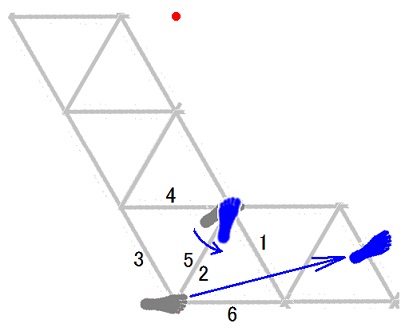
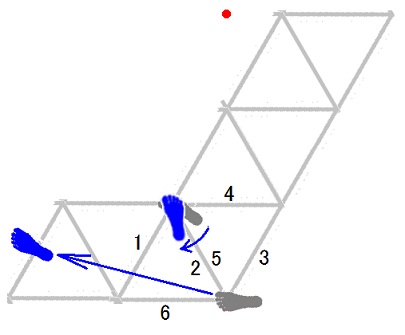
逆回転ホバーから出るP2K1の着地姿勢は、順回転ホバーから出るP1K1の着地姿勢と同じです。
| 胴の向き=右 | 胴の向き=左 | ||
| 足 の 位 置 と 向 き |
A F S 上 起 姿 勢 |
 |
 |
| A F S 基 本 姿 勢 |
|||
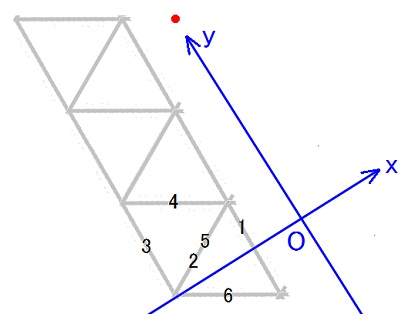
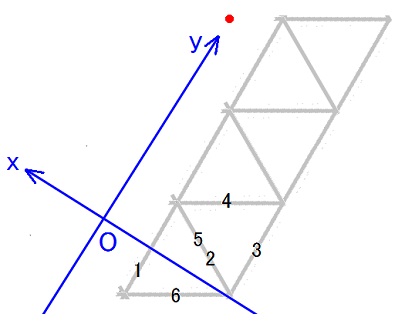
| A F S 姿 勢 の 座 標 軸 |
 |
 |
|
| 地面から離さない方の 足(の中指の中足趾節関節)の位置 |
(x, y) = (-0.5スネ, 0.5スネ) |
| AFS上起姿勢が完成するタイミング(打蹴技起動可能始)は、ホバー逆回転の第3状態から第2状態への移行が完了した0.78秒後です。 |
フォアハンド打ちとバックハンド打ちでは始状態の腕の配置が異なるので、AFS上起姿勢が完成するタイミングも異なる。
第2状態(レの字立ち)からAFS上起姿勢への移行は重心の下降を伴うので、始状態での腕の位置が高い打ち技の方がAFS上起姿勢の完成が早い。
以前は私は、フォアハンド打ちでは0.78秒、バックハンド打ちでは0.82秒と書いていました。
その頃はバックハンド打ちでは始状態で標的に当てない方の腕をガード形に配置せず手を腰の高さに置いていた。
一方、フォアハンド打ちでは始状態で標的に当てない方の腕をガード形に配置し手を頬の高さに置く。
0.78秒か0.82秒かという違いの原因はそこにあっただろう、と私は見ている。
その後、バックハンド打ちでも始状態で標的に当てない方の腕をガード形に配置し手を頬の高さに置く様に、バックハンド打ちのデザインを変更したので、ここでは0.82秒という数値を捨てて、0.78秒という数値をH2cとH2dに共通の時間として書いています。
各攻撃技のインパクトのタイミングの可能最早値(インパクト可能始)は、AFS上起姿勢が完成するタイミングよりも、各攻撃技の到達時間(起動からインパクトまでの時間)だけ遅い。
各攻撃技の到達時間は、今後の再測定によって更新される事が予想されるので、更新が有っても更新後の値が自動的に反映される様に、個別技のページの内容を以下に埋め込み表示しておきます。
| 前 振 水 平 打 |
|
| 後 振 水 平 打 |
フォアハンド打ちやバックハンド打ちの代わりに、フォアバック同時打ちや、極真空手で「円形逆突き」と呼ばれている技を実行してもよい。
H2cとH2dでは、実際にやってみると、標的に近い方の足の爪先を十分に外に向ける事を怠りがちだったので、標的に近い方の足の爪先を外に向ける事を意識して練習する事にした。
---
順回転から出るH1abcd1との違いは、返撃か迎撃かの違いだけです。
第2状態の私に連動式短前ストレート打ちを当てようとして失敗した敵にH2cdで返撃する事は、第2状態の私に連動式短前ストレート打ちを当てようとしている敵をホバー順回転から出るH1abcd1で迎撃する事と同様です。
第1状態の私に連動式短前ストレート打ちを当てようとしている敵をH2cdで迎撃する事は、第1状態の私に連動式短前ストレート打ちを当てようとして失敗した敵にホバー順回転から出るH1abcd1で返撃する事と同様です。
ただし、敵の姿勢が連動式短前ストレート打ちの終状態である間にH2cdがヒットするのか、敵の姿勢がAFS基本姿勢である間にH2cdがヒットするのかが、ホバー逆回転から出るH2cdとホバー順回転から出るH1abcd1とで異なる場合が有ります。
---
| ポジショニング事典 | 敵が標的にする私の状態 | ||||||
| 第1状態 | 第2状態 | 第3状態 | 第4状態 | 第5状態 | 第6状態 | ||
| 敵の攻撃技 | AFS | KF11A | KF12A | KF13A | KF14A | KF15A | KF16A |
| BFS | KF11B | KF12B | KF13B | KF14B | KF15B | KF16B | |
| 蹴り | KF11K | KF12K | KF13K | KF14K | KF15K | KF16K | |
| タックル | KF11T | KF12T | KF13T | KF14T | KF15T | KF16T | |