since 2003
イレコナビ サイトマップ
| 気態用 | 液態用 | 固態用 |

敵が攻撃して来ると、あたかも量子力学の観測問題の波束の収束の様に、魔物が一瞬で2本足のヒトに収斂して敵を撃つ。
上の写真を見れば分かる様に、5つの存在位置のうちのいずれかの私を敵が攻撃してそれが間違っていれば、敵は私に十分なダメージを与える事が出来ない。
私の5つの存在位置は少しずつしか離れていないけれど、それでもそのぐらいには離れている。
私が動き続けているせいで、敵は偏差射撃せざるを得ない。
しかし、偏差射撃(現在位置ではなく将来位置を狙っての攻撃)は私の動きを想定しての射撃であるので、私の実際の動きがその想定と異なれば失敗する。
四つ足の構えは、戦術的不規則性に戦術的複雑性を代用し、低スタミナ消費、エンドレス、即興でのフェイント編集自由度が大きく、ハンズフリーで、ローキックや抱き付きを盲点としない2次元歩行です。
四つ足の構えを利かせて戦う事が出来るのは世界に5人しか居ない、と最初は言われるかもしれないが、その後きっと普及するだろう。
ボクシングの試合でだったと思うが、有効打を当てられてその場でよろめいている選手に相手の選手が追撃しようとしているのに追撃できないで居るのを見た事が有る。
狙いが定まらなかったんだと思う。
これが、ジャッキー・チェン主演の映画でおなじみの酔拳、の極意なのではないか。
四つ足の構えホバーは、カポエイラのジンガにも似ている。
また、横断歩道をテクテク歩いている人を空手やボクシングの技で攻撃するのは難しいだろう。
空手やボクシングの技は、敵が止まれば攻撃できるんだけど、歩き続ける敵を攻撃するには向かない。
歩いている人の前方進路上や進路脇に立って待ち、技が当たる位置関係に成った瞬間にストレート打ちや回し蹴りをする事なら出来る。
しかし、歩いている人がそれを見て歩く向きを変えたら、それも出来ない。
四つ足の構えは、AFSや蹴りのこうした弱点に付け込む構えです。
歩き続ければ攻撃されないけど、それでは敵との距離が変わってしまう。
この問題を解決するのが、四つ足の構えのホバリングモードです。
もし四つ足の構えがズボシで、格闘技の大正解なら、突きや蹴りは、練度の高い技でなくても、素人パンチや、一応正拳突きとか、大体回し蹴りといった感じの技でも勝てるだろう。
---
四つ足の構えのエッセンス。
四つ足の構えでは、歩行状態が構えである、と考えます。
足間隔が狭く腰が高い四つ足の構えの各状態は歩く為の姿勢であり、移動せず各状態を静止構えとして使うのは間違いです。
一方、足間隔が広く腰が低いAFS基本姿勢は移動には向きません。
足間隔が広いという事は、歩くにも向かないし、踏み込み余力が少ないという事です。
それに対して四つ足の構えの各状態では足間隔が狭いので踏み込みの為のバネが貯まっています。
イス取りゲーム。
四つ足の構えからAFS基本姿勢への移行は、イス取りゲームの要領で行ないます。
敵と自分の間に勝ち負けが発生する原理も、イス取りゲームと同じです。
これは未実証です。
このように、四つ足の構えの各状態は静止構えではありませんが、蹴りの為の構えとしてなら、四つ足の構えの各状態も、静止構えとして使えます。
AFS姿勢は足間隔が広いので蹴りを出す為の構えには向かない。
足間隔が狭い四つ足の構えの各状態からなら、どちらの向きにも重心移動できるが、足間隔が広いAFS姿勢は重心移動の向きを限定してしまう。
---
四つ足の構えの抽象的な防御思想。
抽象的なので空手以外の対戦にも使える考え方だと思います。
四つ足の構えを私は防御方法として編み出しました。
攻撃用法は副産物です。
四つ足の構えは、決定論的な空手に代わって確率論的な空手を生成する具体例です。
決定論的というのは、こうすれば必ずこうなる式の考え方です。
確率論的というのは、こうすればこうなる場合が多い式の考え方です。
四つ足の構えで私が目指すのは、グチャグチャグチャ、ポン、といった感じの確率論的な展開です。
決定論的なやり方では遅れが生じます。
約束組手は、せえので一緒に動くから成立するのであって、反応して動くなら重心移動が遅れるだろうと思います。
動き始めるのが早過ぎれば、それを見て敵は攻撃を中止、延期します。
これはフライイングです。
フライイングすれば、構え直す前に撃たれて負けてしまうか、振り出しに戻ります。
約束組手では動き始めるのが早過ぎても敵は、飛んで火に入る夏の虫のように攻撃して来てくれますが、それは、そう約束しているからです。
動き始めるのが遅過ぎれば、追われ続ける事に成る、つまり、敵の攻撃が命中しないようにするだけなら辛うじて出来るが、それで精一杯であり、私の反撃より先に敵の追撃が来てしまう、そのせいで追われ続ける事に成り、いわゆる「むむ、このままではじり貧だ」に成ってしまいます。
したがって、約束なしの自由組手で約束組手と同じ現象を引き起こすには、敵と同時に動き始める必要が有ります。
そう結論するには少し論理に飛躍が有りますが、それが私の予想です。
しかし、敵の動きに反応して動き始めたのでは、敵と同時に動き始めるのは不可能です。
同時を実現するのは偶然によるしかない、つまり、敵の予定と私の予定が偶然一致していたせいで動き始めるのが同時に成った、という風にするしかありません。
敵が見て、こちらが動くとは思わなかったのに動いたからやり損じた、止まるとは思わなかったのに止まったからやり損じた、曲がるとは思わなかったのに曲がったからやり損じた、という風にするんです。
敵と私が偶然同時に動いた、そのチャンスを逃さず返撃や迎撃をします。
四つ足の構えの防御方法は「ブロック」「パリー」「かわす」のうちの「かわす」です。
ブロックやパリーは、かわし切れなかった分を防ぐ補助という位置づけです。
「かわす」のうちでも、重心移動によってかわすのが、四つ足の構えによるかわし方です。
重心不動のまま姿勢を変えてかわすのは、重心移動でかわし切れなかった分を防ぐ補助という位置づけです。
重心不動のまま姿勢を変えてかわしたり腕で払ったりする方法は、コンビネーション攻撃やフェイントに弱い、と聞きます。
反応できないっ、てのも有ると思う。
また、護身実用ではグローブが無い分だけガードでブロックするという戦術の有効性は減ります。
手足が届かない位置から手足が届く位置まで敵が重心移動するのと同時に私も重心移動したせいで敵の攻撃が失敗した、という現象が起こるように狙います。
最初から手足が届く位置関係なら、重心不動で姿勢を変えたり腕で払ったりして敵の攻撃を防ぐのすら遅れてしまい易いのだから、重心移動で敵の攻撃をかわすのは不可能です。
重心移動というのは、重心不動のまま姿勢を変更するよりも、ずっと時間がかかる、つまり、重心移動というのは、どうしても緩慢な動作に成ってしまいます。
これは、重心移動の加速度の水平成分が本質的には重力によって規定されるせいです。
その様子は、重力が地球表面の6分の1である月面では宇宙飛行士の重心移動が極めてゆっくりになるのを思い出せば、よく分かります。
走行速度は幾らでも大きく出来るけど、水平加速度には上限があるわけです。
人間は2本脚で立っているので、どうしても掌の上に立てたペンの様に重心移動の加速度が小さく成ります。
高く積まれた箱を下から片手で持って運ぶ蕎麦の出前の配達イメージでもよい。
脚を床に平行に近付ければ水平加速度も大きく出来るけれど、脚を床に平行に近付ければ1ステップ分の移動距離が小さく成り移動方向も限定されてしまいます。
そういった事を思い出せば、鍛錬によって重心移動を幾らでも高速化できる、という考えはウソだと分かります。
地面を蹴るのではなく倒れるのだという忍術や古武術でも、与えられた重力環境下での重心移動の早さを最大化できるだけで、重力で決まる限界を超える事は出来ません。
筋力の増加に合わせて重力も増加するなら重心移動は幾らでも早く成るが、重力は変わらないから、それは望めないわけです。
筋力を増やした分だけ重心の加速度を増やす事は出来るんだけど、それではジャンプに成ってしまいます。
したがって、忍術や古武術を極めれば重心の水平移動がほとんど瞬間移動みたいになる、という考えは妄想です。
ただし、妄想という言葉をむやみに使うのは、やめましょう。
というわけで、重心移動は加速度が小さいので、空手の自由組手における位置取り競争は、誇張すると、軍艦同士の艦隊決戦のごとくです。
おもかじいっぱーい、とりかじいっぱーい、推進機反転、エンジン全開、大変です艦長このままでは衝突します、駄目です、間に合いません、といったニュアンスです。
重心移動にはこの様な緩慢さが有るので、敵の攻撃を重心移動でかわすのは、反応して動くのでは間に合わない、と私は見ています。
敵の攻撃を見て反応してでも「瞬間移動できるものならあの位置にこの向きに自分の身体を直ぐに置きたい、今それが出来れば勝てる」という判断は着弾前に完了できるんだけど、実際の重心移動は瞬間ではないので間に合いません。
反応して動くのでは間に合わないから、予め動いておく、これが四つ足の構えの防御方針です。
因みに、予め動き続けて敵を翻弄しておくのがサバキだ、という意味の解説をキックボクシングの宍戸祐太さんがするのをYouTubeで見た時に、芦原空手のサバキは反応して動くタイプのサバキである事を思い出し、芦原空手のサバキは本当のサバキではないのではないかという疑問を持つ様に成りました。
予め動いておくには、どういう方法が有るでしょうか。
山勘にしたがって先に動く事が考えられます。
山勘で動いた結果が偶然敵の攻撃と同時だった、山勘が的中した、という場合には、勝てます。
液態で待ち拳のタイミングを得るには、反応して動くのでは間に合わない、山勘で動く場合の早さ(アーリネス)が必要です。
しかし、山勘で動けば、山勘が外れた場合、窮地に立たされるし、山勘判断が大脳判断である事による不利も生じます。
四つ足の構えは、小脳化されたプログラムにしたがって予め常に動き続けておく事によって敵の攻撃を空振りさせたり当たり損ねさせたりするので、山勘で動く場合と同じ早さ(アーリネス)を達成できるし、動いた後直ぐに次の重心移動に入る事を繰り返すので、山勘が外れた場合の危機に相当する危機が出来るだけ小さく成ります。
山勘や四つ足の構え以外に、敵の考えを読む、読みにもとづいて敵と同時に動く、という方法も有ります。
それが理想かもしれないが、それは難度が高い。
デタラメに動き続ける方が簡単です。
読みに基づいて敵と同時に動く方法は決定論的な空手に属します。
それに対して、デタラメに動き続けるのは確率論的な空手です。
四つ足の構えは確率論的な空手ですが、四つ足の構えの動きはデタラメではなく規則的です。
これは、戦術的不規則性に戦術的複雑性を代用した、という事です。
不規則にしようと思っても出来ないし、不規則にする事に気を取られると他の事がお留守に成ってしまいます。
規則的でも十分に複雑ならば、敵にとっては不規則なのと同じです。
複雑でも規則的なら、パターンをロム化つまり小脳化しておく事が出来るので、大脳資源をそこに食われずに済みます。
四つ足の構えのホバーは、そういう意味での必要な複雑さを備えた最小の歩行パターンです。
歩行パターンが規則的なのに四つ足の構えが確率論的な空手であるのは、こちらの規則的な動きへの敵の反応がバラつくからです。
最後に、四つ足の構えの使用条件を説明します。
四つ足の構えは、構えであって姿勢ではないから、攻撃開始前に使うものであって、攻撃中に使うものではありません。
打ち合い中に取る姿勢とは違います。
四つ足の構えが有効だと思われるのは、膠着状態、見合っている状態、手をこまねいている状態です。
シーシー言いながら打ち合ってる状態では使えません。
ただし、打ち合い状態でも、中段足蹴り合戦でなら、コンビネーション用のステップとして四つ足の構えを使えます。
(独立式の手技も四つ足の構えから出ずに打てます)
格闘技の試合の観戦中に、ここで四つ足の構えが使えるぞ、という膠着状態を見る事が多い。
膠着状態は、自分も敵も攻撃技の威力が大きくて、攻撃技を無視して近付く事が出来ない場合に生じます。
だから、四つ足の構えが使えるのは、自分の攻撃技の威力が大きいせいで敵がズカズカとは入ってこれない場合だけです。
自分の攻撃技の威力がそれほどではなく、敵がズカズカ入って来る場合には、四つ足の構えに出番は有りません。
自分の攻撃技の威力が恐ろしいレベルに満たない場合は、四つ足の構えを使えるのは、大きく離れた位置からの接近中だけです。
空手の試合で言うなら、それは、「始めろ」という意味の審判の合図で手足が届く位置まで両者が移動している間だけです。
この僅かな時間の間だけ、近付いて来る敵を四つ足の構えホバーで待ち構えたり、待ち構えている敵に四つ足の構え直進やジグザグ進で近付いたり出来ます。
近付いて来る敵をホバーで待ち構える場合は、周期運度であるホバーには、敵が打ち込んで来るタイミングを限定する作用が有ると考えられます。
いつ来るか?今でしょ、という具合にです。
これは活人剣の考え方のタイミング版だと言えます。
敵が打ち込んで来るタイミングが予めわかっているなら、そこでカウンター攻撃をする様に計画できます。
その場合、私の動きの複雑さが大き過ぎて敵は狙いを定める事が全く出来ないなら、敵は撃って来ないので、敵の目には自分の攻撃が命中しそうに見えるが実際には命中しないような、ギリギリスレスレの複雑さで動く事が肝心です。
狙いが定まらないようにするわけです。
攻撃動作開始時に攻撃の成功を敵が「もらった」という風に確信する事が出来ない、先行き不透明な嫌な感じの状況で敵に見切り発車させる、出たとこ勝負の攻撃に踏み切らせる、という事です。
これは、ホバーの回転速度を加減する事によって達成されるでしょう。
この他に、動きの複雑さをもっと大きくして敵が攻撃の糸口をつかめない状況を作った上で私が先制攻撃する、という選択肢もあります。
---
自動織機の中に落としたコインを拾わなければいけない様な状況に敵を追い込む、というコンセプトです。
自動織機の動きは規則的だけど、大抵はその動きの隙を突く事に失敗して手に怪我を負う。
---
ランダム歩行構えのコンセプトを私は、1990年代には既に考えていたと思いますが、正三角形タイルで構成する具体的な四つ足の構えを考え出したのは2022年05月27日です。
四つ足の構えは戦術的不規則性の代わりに戦術的複雑性を合理性として使っています。
正三角形タイルの正三角形の1辺の長さは1.0スネです。
各ステップでは頭の位置が正三角形の1辺の長さの半分つまり0.5スネだけ移動します。
(頭の横幅)+(拳の有効幅) ≒ 0.5スネ。
この事が、顔面パンチの狙いを、定まらなくします。
足間隔を大きくし過ぎると、例えば第2状態後形から第1状態に移行する時に、股関節を傷める危険が生じます。
靴下を履いて床の上でやってみると、14ステップに約8.3秒ぐらい、重心移動が完了するまで次のステップを始めなければ14ステップに約14.0秒ぐらい、全速でやれば14ステップに約4.3秒ぐらい掛かりました。
普通に歩けば28ステップに約19秒ぐらい掛かった。
インターネットで調べると、1歩に掛かる時間は最大速度では0.6秒、最大歩幅では0.7秒だと書かれていた。
全速でやるには腰から上を不動にして脚足だけ動かす必要が有りますが、全速でなければかなり速いペースでも重心や頭を各歩に随伴させて移動させる事が出来ます。
ペースを上げれば上げるほどローキックに対する防御効果は高まりますが、頭を各歩に随伴させて動かさなければ上段への攻撃に対する防御効果が生じません。
胴の位置や向きが各歩に随伴して変わる事も、中段への攻撃に対する防御効果の点で捨て難い。
のっそのっそペース(14ステップが20秒ぐらい)で実行すれば、こちらが技(わざ)をやってる事に敵が気付かないだろう。
途中の任意のタイミングで一時停止やペース変更や切替や反転を行なえば、規則性が有る事によって生じている隙(すき)を減らす事が出来る。
膝の曲げ角(腰の高さ)を変えて行う事も出来る。
各ステップで足を床スレスレに動かさず床から大きく離す事も出来る。
そうすれば、床面が悪くても対処できる。
足裏(靴裏)と床面(路面)の間の摩擦力(摩擦係数)が大きい時にはヒザや足首にしっかり力を入れておく。
そうしないとヒザや足首の関節を傷める。
前屈立ちと後屈立ちを見れば分かる様に、腰の位置、重心の位置は、両足の位置だけで完全に決まるわけではない。
前屈立ちと後屈立ちでは後足の足爪先の向きが違いますが、両足の位置と爪先の向きを一定に保ったままでも、腰の位置、重心の位置を水平に移動させる事が出来る。
四つ足の構えには、この任意性が有る。
この任意性は、中段への直蹴りがファウルに成るかヒットに成るかや暖簾に腕押しに成るか痛打に成るかを左右するほど大きいだろう。
アスファルト路面の上でゴム底靴を履いて行なうと路面から大きい摩擦力を取れて良好だった。
ただし、ひねり摩擦が大きいので、その点は、膝や足首を傷めそうで、不都合だった。
1ステップに要する時間も上記より短く成りそうだ。
足間隔をAFS基本姿勢と同じにした方が強そうに見え、そちらの方が本当に強いのかもしれないが、そうすると、蹴りが出せない、踏み込み代(しろ)が残らない、1歩に要する時間が長く成る、燃費が悪く(継続可能時間が短く)なる、交わすのに必要な量を超えて動いてしまう事に成る(無駄が多い)のではないか。
四つ足の構えは主に重心移動だし、技が届かない距離での構えなので、手は腰の高さに置く。
手・腕を高い位置に置くと、そのせいで少しだけだが重心も高く成ってしまい、重心移動が困難に成る。
構えからAFS基本姿勢に移行する瞬間に手と腕をガード形に配置する。
四つ足の構えから出る直前までガードを作らず直前に成ってから作る。
そうすると敵が事前に狙えない。
複数有るガードのどれが来るか敵に分からないからだ。
また適宜、構えでの手と腕の位置は、バックハンド打ちなどの始状態(バネが貯まった状態)にする。
この他に、こちらが何の技を出そうとしているかを敵が誤認したり分からなかったりする様な手・腕の配置や運動のヴァリエイションを考案する必要が有る。
私は、水中でのタコの足の動きみたいな物を考えたい。
四つ足の構えでの手・腕の配置や動かし方としては、普通の歩行における腕の振り方や、伝統空手の基本姿勢の手をそのまま腰まで落とした配置も考えられる。
普通の歩行における腕の振り方は、そのままでは実用的でなくても、手・腕の配置や動かし方をデザインする為の基礎データとして有用である。
普通の歩行の腕の振り方をホバリングに適用すると、左3回連続と右3回連続を交互に振る事に成る。
直進なら、左2回連続と右2回連続を交互に、です。
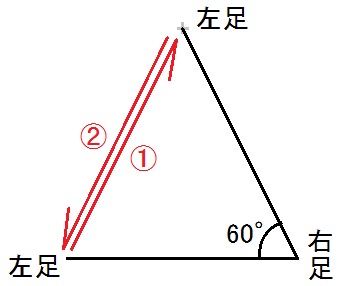
四つ足の構えは、以下の(1)(2)(3)(4)の運足の順列として表される歩行状態です。
(1)は、右足を中心として左足を前方に60度回転した位置まで直線的に移動する運足です。
(2)は、右足を中心として左足を後方に60度回転した位置まで直線的に移動する運足です。
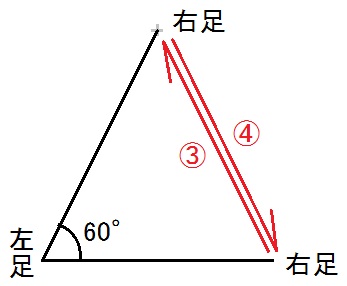
(3)は、左足を中心として右足を前方に60度回転した位置まで直線的に移動する運足です。
(4)は、左足を中心として右足を後方に60度回転した位置まで直線的に移動する運足です。
移動中の軸足をカカト接地とすれば、つま先が障害物に引っ掛かった時に、スティーヴン・セザール主演のアクション映画に多く見られる関節技を脚にかけられたのに相当するダメージをヒザなどの関節が負ってしまうので、移動中の軸足は足前底(中足)接地とする事にした。
これは、AFSのフレキシングでも同じです。
足裏と地面の間の動摩擦について。
ホバーの第1状態、第6状態、第5状態の間の移動では動摩擦は生じません。
第4状態での足爪先の向きを平行にすれば、ホバーの第3状態、第4状態、第5状態の間の移動でも動摩擦は生じません。
しかし、ホバー第4状態での足爪先の向きを平行にすれば、ホバーから直進に切り替えた時に動摩擦が生じてしまうし、第4状態から蹴るのもやり難く成ってしまいます。
したがって、第4状態での足爪先の向きとしては、不動立ちの様な足爪先の向きを基本とし、平行にするのは変則とします。
2025年06月07日に屋外で四つ足の構えを含む空手技動作チェックをした時に四つ足の構えの第1状態→第2状態→第3状態の部分と第3状態→第2状態→第1状態の部分で膝が痛くなった。
アスファルトではなく砂地面の上で動作したが、痛く成った。
膝にしっかり力を入れておけば防げるか今後検証したい。
四つ足の構え実行中は、どちらを前、どちらを後ろと認識するかの選択を、直進やレール、レーンを基準に行なうと脳が混乱します。
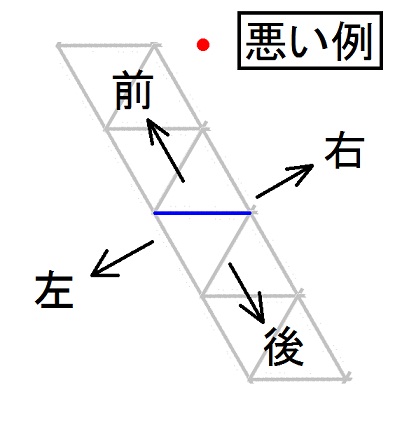
四つ足の構え実行中は、どちらを前、どちらを後ろと認識するかの選択を、第2状態以外の状態の基本形の胴の向きを基準に行なって下さい。
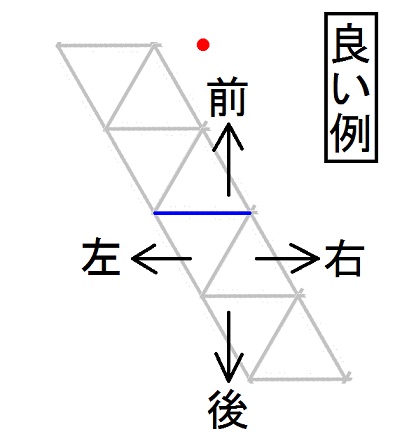
前後左右の認識の選択をこの様に行なっておくと、例えば、第4状態 → 第5状態 → 第6状態という移動は、自分から見て右斜め後ろに後退する、という風に認識され、敵から見て左斜め前に遠ざかる嫌な動きである事が、非常に分かり易い。
四つ足の構えは例えばサッカーボールに応用が可能です。
左足と右足をサッカーボールの2人のプレイヤーに見立て、例えば直進モードの第1状態で前足が第2状態の後足の位置に向かってボールを蹴る、第2状態の後足が第3状態の前足の位置に向かってボールを蹴る、第3状態の前足が第4状態の後足の位置に向かってボールを蹴る、第4状態の後足が次の第1状態の前足の位置に向かってボールを蹴る、という事を繰り返せば、パスとドリブルを合成したパドスリブルとでも呼びたい様な技を作れます。
| 実 例 |
日時 | 場所 | 大会 | 階級(定義) | 時間割 | 当事者(名前/身長/体重/前足) | 防具 | ラウンド | タイミング | エッヂ | 被撃部位 | 入射角度 | 直前事・ 被撃姿勢 |
注釈 | ||
| 撃者 | 被撃者 | |||||||||||||||
| 実行 | ||||||||||||||||
| チャンス不実行 | ||||||||||||||||
| 2015年12月20日(日本) | 東京・ディファ有明 | DEEP 74 IMPACT | フェザー級 | 5分×3R | 今成正和 | 横田一則 | 開指手袋 | 2 | 3:54~4:01 | - | - | - | 横田が前進して打つ機会を探しているが前進しない。今成はノーガードで棒立ち静止。 | この試合は双方の牽制効果が大きく全般的に四つ足の構えを使えそうな局面が多い。 | ||
下書き
四つ足の構え概論(1)2023年12月27日撮影分@液態用ステップ@空手の技@動画
四つ足の構え概論2(防御思想)2024年09月10日撮影分@液態用ステップ@空手の技@動画
四つ足の構えのヴァリエイション(2023年12月28日撮影分)@液態用ステップ@空手の技@動画
| 四つ足の構え | 基本動作 |
| 装飾動作 | |
| 少年部 |