since 2003
イレコナビ サイトマップ
| 構え | ||
| 気態用 | 液態用 | 固態用 |
| 四つ足の構え | |||||||||
| 基本動作 | 装飾動作 | 少年部 | |||||||
| モード | 遷移 | 出方 | 入り方 | 手・腕 | 頭・首 | 胴体 | 足・脚 | 緩急 | |
| 胴の向き=右 | 胴の向き=左 | ||
| 足 の 位 置 と 向 き |
A F S 上 起 姿 勢 |
 |
 |
| A F S 基 本 姿 勢 |
 |
 |
|
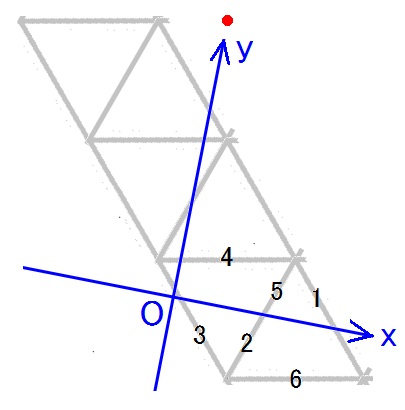
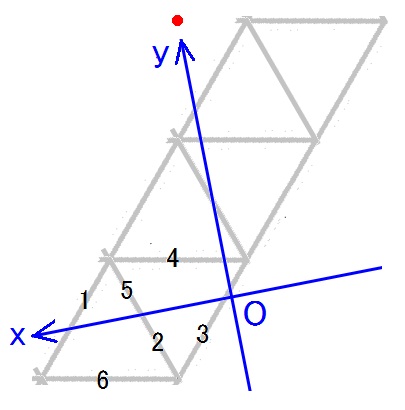
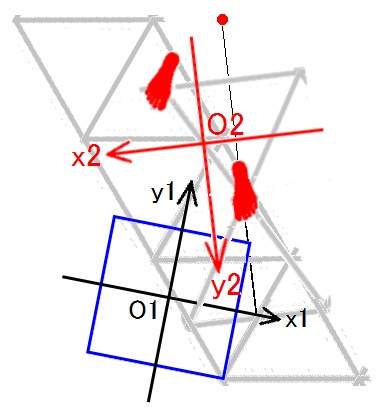
| A F S 姿 勢 の 座 標 軸 |
 |
 |
|
| 地面から離さない方の 足(の中指の中足趾節関節)の位置 |
(x, y) = (0.5スネ, -0.5スネ) |
| AFS上起姿勢が完成するタイミング(打蹴技起動可能始)は、ホバー順回転の第1状態から第2状態への移行が完了した0.75秒後です。 |
フォアハンド打ちとバックハンド打ちでは始状態の腕の配置が異なるので、AFS上起姿勢が完成するタイミングも異なる。
第2状態(レの字立ち)からAFS上起姿勢への移行は重心の下降を伴うので、始状態での腕の位置が高い打ち技の方がAFS上起姿勢の完成が早い。
以前は私は、フォアハンド打ちでは0.75秒、バックハンド打ちでは0.77秒と書いていました。
その頃はバックハンド打ちでは始状態で標的に当てない方の腕をガード形に配置せず手を腰の高さに置いていた。
一方、フォアハンド打ちでは始状態で標的に当てない方の腕をガード形に配置し手を頬の高さに置く。
0.75秒か0.77秒かという違いの原因はそこにあっただろう、と私は見ている。
その後、バックハンド打ちでも始状態で標的に当てない方の腕をガード形に配置し手を頬の高さに置く様に、バックハンド打ちのデザインを変更したので、ここでは0.77秒という数値を捨てて、0.75秒という数値をH2cとH2dに共通の時間として書いています。
各攻撃技のインパクトのタイミングの可能最早値(インパクト可能始)は、AFS上起姿勢が完成するタイミングよりも、各攻撃技の到達時間(起動からインパクトまでの時間)だけ遅い。
各攻撃技の到達時間は、今後の再測定によって更新される事が予想されるので、更新が有っても更新後の値が自動的に反映される様に、個別技のページの内容を以下に埋め込み表示しておきます。
| 前 振 水 平 打 |
|
| 後 振 水 平 打 |
H2*の動きは、敵から見て私が目前を横切る様に後ろ歩きで踏み込む動きです。
私の第2状態を狙って来た敵が少しでも遅れて第2状態を捉え損ねるとH2*を食らう、と見込んでいます。
H2cとH2dでは、フォアハンド打ちやバックハンド打ちの代わりに、フォアバック同時打ちや、極真空手で「円形逆突き」と呼ばれている技を実行してもよい。
H2cとH2dでは、実際にやってみると、標的に近い方の足の爪先を十分に外に向ける事を怠りがちだったので、標的に近い方の足の爪先を外に向ける事を意識して練習する事にした。
---
私の第4状態に連動式短前ストレート打ちを当てようとした敵をH2cやH2dで迎撃する事を考えてみます。
もしこれが可能ならば、予めホーバー順回転中の第3状態を基本形ではなく横形としておく事によって、私がH2cやH2dを実行する事に敵が気付くのを遅らせるべきです。
座標変換式の導出は、逆回転から出るH3abcd1のページに書かれています。
結果のみ引用すると、
AFS基本姿勢での敵のアゴ: (x1, y1) = (0.15スネ, 1.42スネ),
連動式短前ストレート打ちの終状態での敵のアゴ: (x1, y1) = (0.19スネ, 1.30スネ).
一方、フォアハンド打ちの標的の最適位置のy1座標は、どれも1.00スネ以下です。
したがって、H2cで迎撃する事は出来ない、と考えられます。
AFS上起姿勢がリーチ不足の原因だと思われる。
よっしゃ、分かった。
第4状態の私を狙って来た敵を迎撃する場合は、AFS上起姿勢に成るのではなく、逆回転から出るH3abcd1と同じ位置にAFS基本姿勢を作り連動式短前ストレート打ちを実行するのが正しいだろう。
その際に、第1状態から第2状態への移行で地面から離す方の足の着地位置を少しだけ敵の方に寄せる(盤目替え)事によってリーチを稼いだ方が良いかもしれない。
その点では、迎撃にはH2cやH2dよりもリーチの長いH2e1の方が適しているだろう。
しかし、H2e1の着地姿勢は第3状態との違いが大きいので、私の着地姿勢を見て敵が反応してしまうかもしれない。
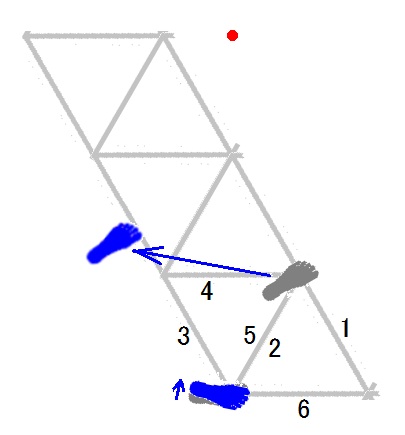
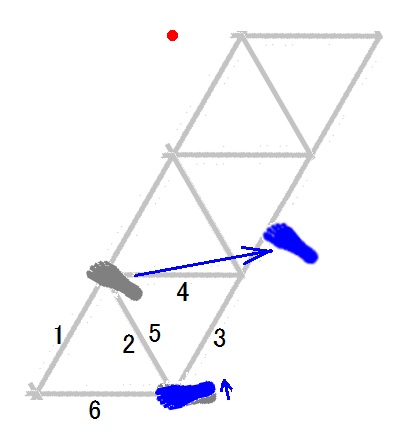
以下の写真は、第4状態の私に連動式短前ストレート打ちを当てようとしている敵をH2c(連動式短前ストレート打ち)で迎撃する様子です。
H2cは敵のアゴには届かない(0.08スネだけ届かないという計算結果に一致する)が、鼻や目には届きそうです。

---
---
次に、第2状態の私を狙って中段前ストレート蹴りを実行して失敗した敵の蹴りの着地姿勢にH2cやH2dを当てる事を考えてみたい。
x1 = 0.5スネ + 0.98129X - 0.19252Y,
y1 = -0.5スネ + 0.98129Y + 0.19252X.
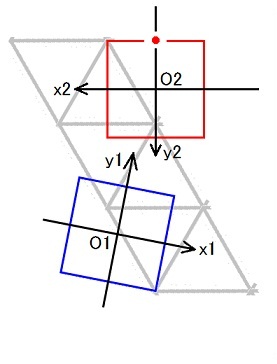
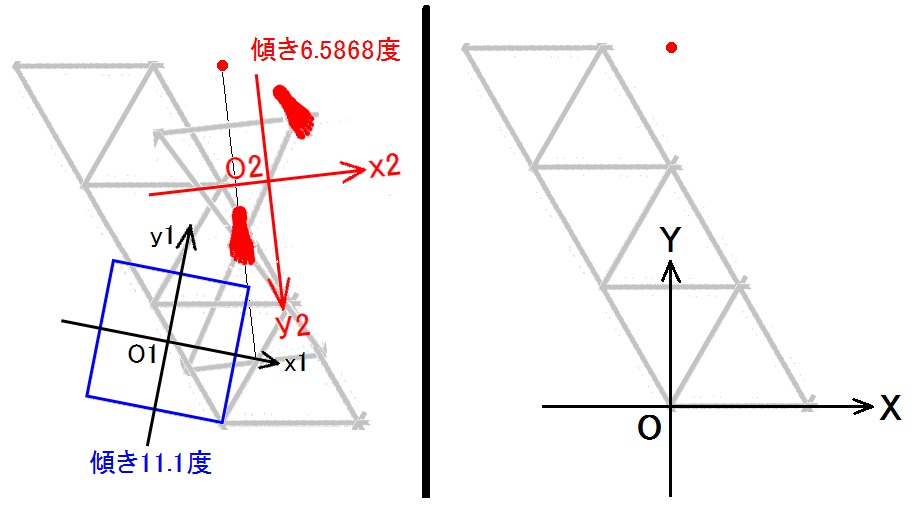
(X, Y) = (0.25スネ, 0.25√3スネ) + (0.25スネ + x2, √3スネ - 0.25√3スネ - y2)を6.5868度回転して得られる座標
X = 0.25スネ + (0.25スネ + x2)cos(6.5868度) - (0.75√3スネ - y2)sin(6.5868度)
= 0.34934スネ + 0.9934x2 + 0.1147y2,
Y = 0.25√3スネ + (0.25スネ + x2)sin(6.5868度) + (0.75√3スネ - y2)cos(6.5868度)
= 1.75215スネ + 0.1147x2 - 0.9934y2.
したがって、
x1 = 0.5スネ + 0.98129(0.34934スネ + 0.9934x2 + 0.1147y2) - 0.19252(1.75215スネ + 0.1147x2 - 0.9934y2)
= 0.5055スネ + 0.9527x2 + 0.3038y2,
y1 = -0.5スネ + 0.98129(1.75215スネ + 0.1147x2 - 0.9934y2) + 0.19252(0.34934スネ + 0.9934x2 + 0.1147y2).
= 1.2866スネ + 0.3038x2 - 0.9527y2.
敵のレの字立ちのアゴの座標は
(x2, y2) = (0.08スネ, 0.04スネ)
これを代入すると、
(x1, y1) = (0.594スネ, 1.273スネ)
これでは遠過ぎてフォアハンド打ちは届かない。
けれど、連動式短前ストレート打ちなら届くかもしれないし、H2e1なら間違いなく届く。
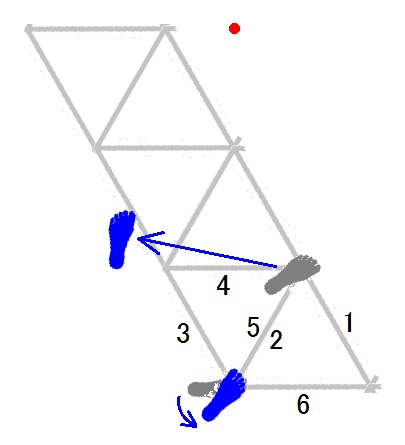
以下の写真は、私の胴の向き=右で、第2状態の私に前ストレート蹴りで自分の右足を当てようとして空振りした敵の蹴り足の着地の瞬間に私がH2c(連動式短前ストレート打ち)で返撃する様子です。
写真中では距離が少し近過ぎますが、こう成るまでの間に敵のアゴがH2cの標的の最適位置を通過する瞬間が有るはずなので、その瞬間にH2cがヒットする様にすればよい。
H2cとしてフォアハンド打ちするには距離が少しだけ遠過ぎる事も写真から分かり、この事は計算結果に一致します。

---
敵が反対の足で蹴って来た場合には、フォアハンド打ちが届きそうなので、それを以下で調べてみる。
x1 = 0.5スネ + 0.98129X - 0.19252Y,
y1 = -0.5スネ + 0.98129Y + 0.19252X.
(X, Y) = (0.25スネ, 0.25√3スネ) + (-0.25スネ - x2, √3スネ - 0.25√3スネ - y2)を6.5868度回転して得られる座標。
X = 0.25スネ + (-0.25スネ - x2)cos(6.5868度) - (0.75√3スネ - y2)sin(6.5868度)
= -0.14736スネ - 0.9934x2 + 0.1147y2,
Y = 0.25√3スネ + (-0.25スネ - x2)sin(6.5868度) + (0.75√3スネ - y2)cos(6.5868度)
= 1.6948スネ - 0.1147x2 - 0.9934y2.
したがって、
x1 = 0.5スネ + 0.98129(-0.14736スネ - 0.9934x2 + 0.1147y2) - 0.19252(1.6948スネ - 0.1147x2 - 0.9934y2)
= 0.029スネ - 0.9527x2 + 0.3038y2,
y1 = -0.5スネ + 0.98129(1.6948スネ - 0.1147x2 - 0.9934y2) + 0.19252(-0.14736スネ - 0.9934x2 + 0.1147y2).
= 1.1347スネ - 0.3038x2 - 0.9527y2.
敵のレの字立ちのアゴの座標は
(x2, y2) = (0.08スネ, 0.04スネ)
これを代入すると、
(x1, y1) = (-0.035スネ, 1.072スネ)
これならフォアハンド打ちのリーチ不足は少しだけなので、敵の蹴足着地の瞬間の姿勢なら届くだろう。
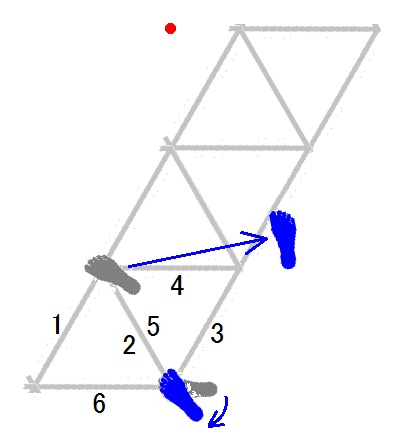
以下の写真は、私の胴の向き=右で、第2状態の私に前ストレート蹴りで自分の左足を当てようとして空振りした敵の蹴り足の着地の瞬間に私がH2c(フォアハンド水平打ち)で返撃する様子です。
フォアハンド打ちのリーチが足りるか足りないかの境目辺りに成っており、この事は計算結果に一致しています。

---
| ポジショニング事典 | 敵が標的にする私の状態 | ||||||
| 第1状態 | 第2状態 | 第3状態 | 第4状態 | 第5状態 | 第6状態 | ||
| 敵の攻撃技 | AFS | KR21A | KR22A | KR23A | KR24A | KR25A | KR26A |
| BFS | KR21B | KR22B | KR23B | KR24B | KR25B | KR26B | |
| 蹴り | KR21K | KR22K | KR23K | KR24K | KR25K | KR26K | |
| タックル | KR21T | KR22T | KR23T | KR24T | KR25T | KR26T | |