since 2003
イレコナビ サイトマップ
| 構え | ||
| 気態用 | 液態用 | 固態用 |
| 四つ足の構え | |||||||||
| 基本動作 | 装飾動作 | 少年部 | |||||||
| モード | 遷移 | 出方 | 入り方 | 手・腕 | 頭・首 | 胴体 | 足・脚 | 緩急 | |
2026年01月16日に、H3a, H3b, H3c, H3dをH3a1, H3b1, H3c1, H3d1に改名しました。
| 胴の向き=右 | 胴の向き=左 | |
| 足 の 位 置 と 向 き |
 |
 |
| A F S 基 本 姿 勢 の 座 標 軸 |
 |
 |
| 地面から離さない方の 足(の中指の中足趾節関節)の位置 |
(x, y) = (0.5スネ, -0.5スネ) |
| AFS基本姿勢が完成するタイミング(打蹴技起動可能始)は、ホバー逆回転の第4状態から第3状態への移行が完了した0.43秒後です。 |
各攻撃技のインパクトのタイミングの可能最早値(インパクト可能始)は、AFS基本姿勢が完成するタイミングよりも、各攻撃技の到達時間(起動からインパクトまでの時間)だけ遅い。
各攻撃技の到達時間は、今後の再測定によって更新される事が予想されるので、更新が有っても更新後の値が自動的に反映される様に、個別技のページの内容を以下に埋め込み表示しておきます。
| 独 立 式 縦 拳 直 打 |
|
| 連 動 式 短 前 直 打 |
|
| 連 動 式 長 前 直 打 |
----
第4状態の私に連動式短前ストレート打ちをした敵に、H3c1かH3d1で返撃する事を考えてみます。
下図では、敵のAFS基本姿勢の定義正方形を赤色で、私のAFS基本姿勢の定義正方形を青色で描いてあります。
私の座標系での敵のアゴの座標を求める為に、計算手段として中継座標系(X-Y-O)を設定しました。
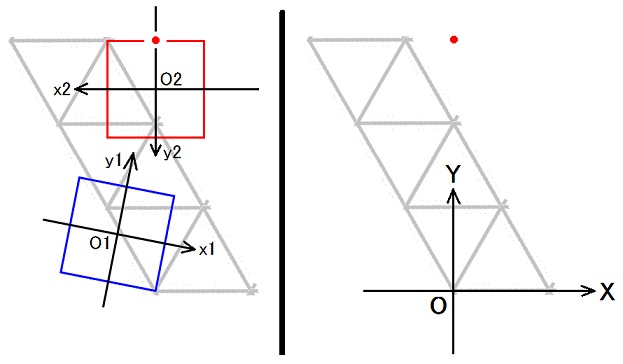
(X, Y) = (0, 1.5√3スネ - 0.5スネ) + (-x2, -y2) = (-x2, 2.098スネ - y2).
(X, Y) = Oを中心に(-0.5スネ + x1, 0.5スネ + y1)を-11.1度回転して得られる座標
X = (-0.5スネ + x1)cos(-11.1度) - (0.5スネ + y1)sin(-11.1度),
Y = (-0.5スネ + x1)sin(-11.1度) + (0.5スネ + y1)cos(-11.1度).
x1 = 0.5スネ + Xcos(-11.1度) + Ysin(-11.1度) = 0.5スネ + 0.98129X - 0.19252Y
= 0.5スネ - 0.98129x2 - 0.19252(2.098スネ - y2),
y1 = -0.5スネ + Ycos(-11.1度) - Xsin(-11.1度) = -0.5スネ + 0.98129Y + 0.19252X
= -0.5スネ + 0.98129(2.098スネ - y2) - 0.19252x2.
敵のアゴの座標は、
AFS基本姿勢では(x2, y2) = (-0.03スネ, 0.15スネ),
連動式短前ストレート打ちの終状態では(x2, y2) = (-0.04スネ, 0.27スネ).
だから、これらの私の座標系での座標は、
AFS基本姿勢での敵のアゴ: (x1, y1) = (0.15スネ, 1.42スネ),
連動式短前ストレート打ちの終状態での敵のアゴ: (x1, y1) = (0.19スネ, 1.30スネ).
一方、私のH3c1(短前ストレート打ち)の標的の最適位置の座標は、AFS基本姿勢のアゴの高さを打つ場合、
(x1, y1) = (0, 1.22スネ)
H4c1の場合よりはマシだが、やはり少しリーチが足りない。
H3d1(長前ストレート打ち)なら標的の最適位置の座標は、AFS基本姿勢のアゴの高さを打つ場合、
(x1, y1) = (0, 1.38スネ).
これなら、理想的です。
標的のx座標がゼロである場合よりもプラスである場合の方が標的のy座標は、連動式短前ストレート打ちでは大きく成り、連動式長前ストレート打ちでは小さく成るはずだから、H3c1とH3d1の両方が完全にフィットする疑いも有る。
ここまで、2026年03月07日時点での手持ちのデータを使いました。
H4c1, H4d1はやり方として間違っていて、H3c1, H3d1が本当の正しいやり方だ、という結論が得られたと解釈してはいけないのだろうか。
そうだとすると、これは一般相対性理論における水星の近日点移動に喩えられるのではないか。
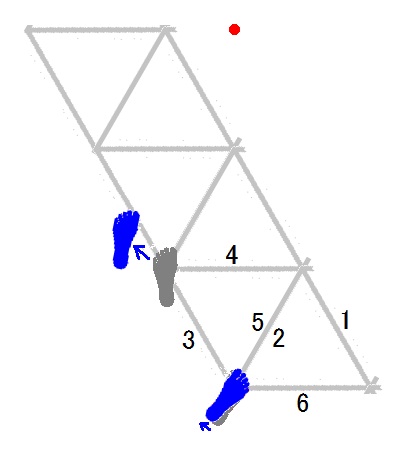
以下の写真はH3c1の様子です。
少し届いていない、計算通りって事か。。

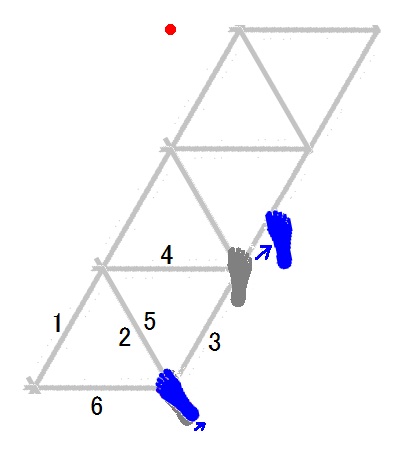
以下の写真はH3d1の様子です。
届いている、計算通りって事か。

ポジショニング・アナライザーを使った分析結果は以下です。
ただし、ここまででx1-y1-O1と書かれて来た座標系は、ポジショニング・アナライザーではx3-y3-O3です。
ポジショニング・アナライザーではx1-y1-O1としては、第4状態外八字立ちの座標系を使いました。
| ケース1 | ケース2 | ||
| 入 力 |
direction of x1 and x2 same(1) or opposite(-1)? | -1 | -1 |
| x1 of my part x1a=? | 0 | 0 | |
| y1 of my part y1a=? | 0 | 0.01 | |
| x2 of my part x2b=? | 0 | 0 | |
| y2 of my part y2b=? | √3 - 0.5 = 1.23205 | 1.08 | |
| x2 of his part x2a=? | -0.04 | -0.04 | |
| y2 of his part y2a=? | 0.27 | 0.27 | |
| x1 of his home x1c= ? | 0 | 0 | |
| y1 of his home y1c/SQR(3)=? | 1 | 1 | |
| x2 of his home x2c=? | 0 | 0 | |
| angle of y1 tht1=? | 0 | 0 | |
| direction of x1 and x3 same(1) or opposite(-1)? | 1 | 1 | |
| x3 of my pole x3a=? | 0.5 | 0.5 | |
| y3 of my pole y3a=? | -0.5 | -0.5 | |
| x1 of my pole x1d=? | 0 | 0 | |
| y1 of my pole y1d/SQR(3)=? | -0.5 | -0.5 | |
| angle of y3 tht3 input(1) or not(0)? | |||
| angle of y3 tht3=? (前項で1を入力した場合にのみ表示される) |
-11.1 | -11.1 | |
| 出 力 |
angle of -y2 tht2= | 0 | 0 |
| x1 of his part x1b= | 省略 | 0.04 | |
| y1 of his part y1b= | 省略 | 0.8200001 | |
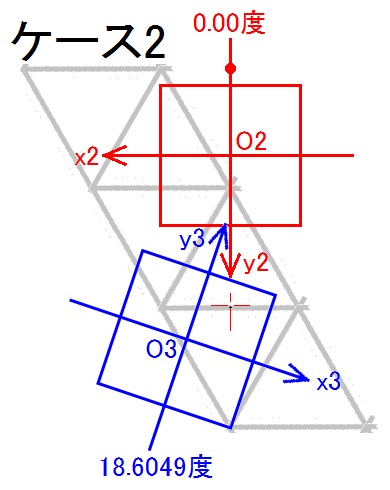
| angle of y3 tht3= | -17.12294 | -18.6049 | |
| x3 of his part x3b= | 5.960465×10-8, 0.1873074(θ3=-11.1) |
0, 0.2146551(θ3=-11.1) |
|
| y3 of his part y3b= | 1.258823, 1.301578(θ3=-11.1) |
1.110677, 1.162185(θ3=-11.1) |
|
| distance of his part= | 1.258823, 1.314986(θ3=-11.1) |
1.110677, 1.181842(θ3=-11.1) |
ケース2では敵と私のアゴ頂の位置座標を入力しました。
ケース2では、H3d1だけでなくH3c1も届く、という結果に成っています。
---
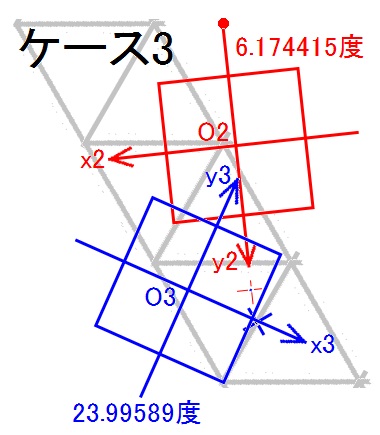
第2状態や第1状態の私に連動式短前ストレート打ちを当てようとしている敵をH3c1で迎撃する事を考えてみる。
ポジショニング・アナライザーを使った分析結果は以下です。
x1-y1-O1としては、第2状態と第1状態のレの字立ちの座標系を使いました。
| ケース3 | ケース4 | ケース5 | ケース6 | ケース7 | ||
| 入 力 |
direction of x1 and x2 same(1) or opposite(-1)? | -1 | -1 | -1 | -1 | -1 |
| x1 of my part x1a=? | -0.22 | 0.08 | 0.08 | 0.08 | 0.08 | |
| y1 of my part y1a=? | 0.08 | 0.04 | 0.04 | 0.04 | 0.04 | |
| x2 of my part x2b=? | 0 | 0 | 0 | 0 | 0 | |
| y2 of my part y2b=? | 1.04 | 1.12 | 1.12 | 1.12 | 1.12 | |
| x2 of his part x2a=? | -0.03 | -0.03 | 0.38スネ | 0 | 0.14 | |
| y2 of his part y2a=? | 0.15 | 0.15 | -0.23スネ | 0.04 | -0.11 | |
| x1 of his home x1c= ? | -2 | -0.75 | -0.75 | -0.75 | -0.75 | |
| y1 of his home y1c/SQR(3)=? | 0.5 | 1.25 | 1.25 | 1.25 | 1.25 | |
| x2 of his home x2c=? | 0 | 0 | 0 | 0 | 0 | |
| angle of y1 tht1=? | -60 | 0 | 0 | 0 | 0 | |
| direction of x1 and x3 same(1) or opposite(-1)? | 1 | 1 | 1 | 1 | 1 | |
| x3 of my pole x3a=? | 0.5 | 0.5 | 0.5 | 0.5 | 0.5 | |
| y3 of my pole y3a=? | -0.5 | -0.5 | -0.5 | -0.5 | -0.5 | |
| x1 of my pole x1d=? | 0.25 | -0.75 | -0.75 | -0.75 | -0.75 | |
| y1 of my pole y1d/SQR(3)=? | -0.25 | -0.25 | -0.25 | -0.25 | -0.25 | |
| x3 of his part x3b=? | 0 | 0 | 0 | 0 | 0 | |
| angle of y3 tht3=? | 11.1 | -30, -32 | ||||
| 出 力 |
angle of -y2 tht2= | 6.174415 | 21.33447 | 21.33447 | 21.33447 | 21.33447 |
| x1 of his part x1b= | -1.022035 | -0.2449529 | -0.765105 | -0.3129163 | -0.4978942 | |
| y1 of his part y1b= | 0.4669631 | 0.9544427 | 1.15924 | 1.04599 | 1.134778 | |
| angle of y3 tht3= | -23.99589 | -39.79573 | -17.75734 | -35.3812 | -27.48845 | |
| x3 of his part x3b= | 5.960465×10-8, 1.262714(θ3=11.1) |
1.192093×10-7, -0.3092068(θ3=-30), -0.3565741(θ3=-32) |
0 | 0 | ||
| y3 of his part y3b= | 0.9758144 | 0.8892821, 0.7642672(θ3=11.1) |
1.011786, 0.8713787(θ3=-30), 0.8423025(θ3=-32) |
0.9589351 | 1.007157 | |
| my part his part distance= | 1.558213 | - | 1.592324, 1.592324(θ3=-30), 1.592324(θ3=-32) |
1.542236 | 1.587931 |
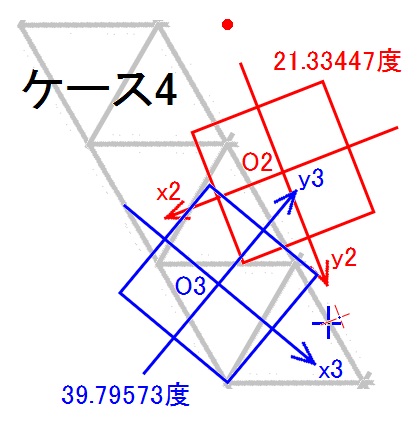
第1状態の私を狙って来た敵を迎撃するケース4ではy3bの値が、独立式長前ストレート打ちで縦正拳を敵のアゴに当てるのに適している。
y3軸とy2軸の相対的な角度が、縦正拳を敵のアゴに当てるには向かないと最初は思ったが、連動式短前ストレート打ちをしている自分を斜め前から動画撮影して観察してみると、そうでもない事が分かった。
連動式ストレート打ちと違って、独立式縦拳打ちは、終状態で肘を伸ばし切らないので、敵のストレート打ちの終状態にアンダーパス道路の様に敵の腕の下を通る形で、敵のアゴを打てそうに見えた。
しかし、敵がストレート打ちの動作を中断するかもしれないので、もっと早いタイミングで当てたい。
基本的に敵の右手・右腕が邪魔に成るが、ストレート打ちの動作開始直前に右手が低い位置にあるタイプの敵も多いだろうし、右手を右耳の辺りまで引いて準備するタイプの敵も多いだろう。
だから、必ず打てるというわけでもないが、打てる場合も多いのではないか。
ケース4では、着地姿勢をAFS基本姿勢ではなくAFS上起姿勢にしてフォアハンド打ちする事が可能なy3bの値に成っている。
自分は第3状態から出る、敵は第1状態を狙う、という事なら、時間的な余裕が生じるので、フォアハンド打ちという選択肢は有望です。
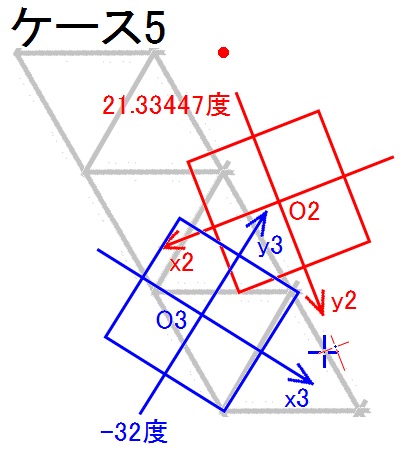
独立式長前ストレート打ちで肘頂を敵の後足側肩側面に当てる事は出来ないかをケース5で調べてみた。
すると、私の肘が敵の肩に届かない事が分かった。
BFSでは届くはずだが、BFSに最適の距離よりも離れているだろう。
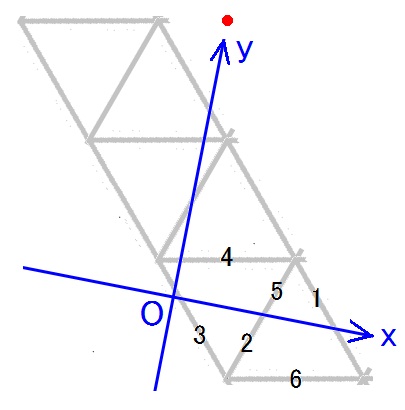
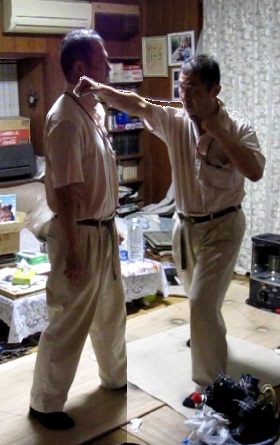
下図は第1状態基本形(胴の向き=右)の私のアゴを敵が正拳連動式短前ストレート打ちで打ち抜いている様子です。
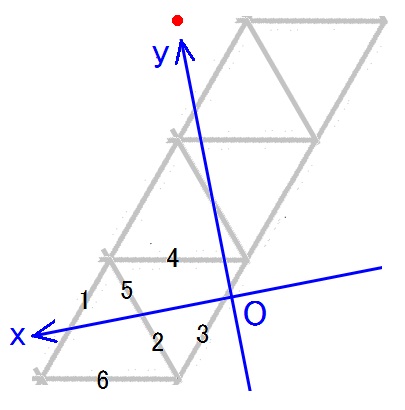
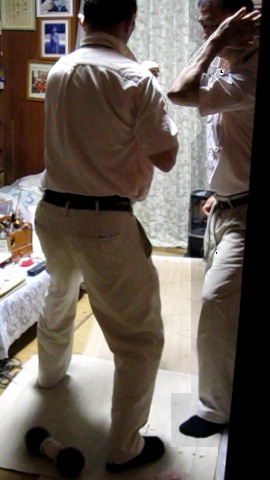
下図は、上図と同じ立ち位置の敵が連動式短前ストレート打ちの動作を始める直前のAFS基本姿勢である時に、私がH3b1で肘頂を敵の肩ないし上腕に当てている様子です。
ポジショニング・アナライザーを使った計算では肘が肩に届かないという結果が出ているが、写真でも届いていない。
届いていないこの位置関係でも、敵が連動式短前ストレート打ちを行なうと、途中で敵の腕が私の肘にぶつかるのではないか。
連動式短前ストレート打ちでミゾオチを打つ事も出来そうに見えるので、それをケース6で調べてみたら、出来る事が分かった。
敵のミゾオチは連動式短前ストレート打ちの標的の最適位置よりも少しだけ近いので、ミゾオチよりも少し低い位置を打てば連動式短前ストレート打ちの出力を最大化できる。
敵の下腹には正拳連動式短前ストレート打ちは届かない。
敵の肋骨後足側下端前部に正拳連動式短前ストレート打ちを当てる事が出来るかをケース7として調べてみた。
y3b=1.01スネと連動式短前ストレート打ちの標的の最適位置のy座標1.11スネの差はミゾオチを打つ場合よりも小さいので、ミゾオチを打つよりも肋骨後足側下端前部を打つ方が連動式短前ストレート打ちに合っている。
y2軸とy3軸の向きの関係も、ミゾオチを打つよりも肋骨後足側下端前部を打つのに適した関係に成っている。


もし、私の肘が敵の肩や上腕に届かなければBFSを使えば届くだろう。
連動式長前ストレート打ちでは届かないという数値に成っている。
下図はBFSの様子です。

| 敵が標的にする | 敵の攻撃技 | 私が標的にする | 私の攻撃技 | θ3 (度) |
ケ | ス 番 号 |
|||||||||
| 私の状態 (x1-y1-O1) |
私の身体部位 (x1a, y1a) (x2b, y2b) |
動き | エッヂ | 敵の姿勢 (x2-y2-O2) |
敵の身体部位 (x2a, y2a) (x1b, y1b) (x3b, y3b) |
動き | エッヂ | 時 | ||||||
| 胴 の 向 き |
状 態 番 号 |
x1 軸 の 向 き |
姿勢 | タイプ | 前足 | |||||||||
| 右 | 4 | 右 | 外八字立ち | アゴ | 連動式短前直打 | 右正拳 | 連動式短前直打の終状態 | 左足 | アゴ | 連動式短前直打 | 右正拳 | 返撃 | -18.60 | 2 |
| 右 | 2 | 右 | レの字立ち | 頬 | 連動式短前直打 | 右正拳 | AFS基本姿勢 | 左足 | アゴ | 独立式縦拳長前直打 | 左正拳 | 迎撃 | -24.00 | 3 |
| 右 | 1 | 右 | レの字立ち | アゴ | 連動式短前直打 | 右正拳 | AFS基本姿勢 | 左足 | アゴ | 独立式縦拳長前直打 | 左正拳 | 迎撃 | -39.80 | 4 |
| アゴ | 連動式短前直打 | 右正拳 | AFS基本姿勢 | 左足 | アゴ | 前振水平打 | 右掌底 | 迎撃 | -39.80 | 4 | ||||
| アゴ | 連動式短前直打 | 右正拳 | AFS基本姿勢 | 左足 | 肋骨後足側下端前部 | 連動式短前直打 | 右正拳 | 迎撃 | -27.49 | 7 | ||||
| アゴ | 連動式短前直打 | 右正拳 | AFS基本姿勢 | 左足 | 右肩・右上腕 | 独立式長前直打 | 左肘頂 | 迎撃 | -32 | 5 | ||||
---
| ポジショニング事典 | 敵が標的にする私の状態 | ||||||
| 第1状態 | 第2状態 | 第3状態 | 第4状態 | 第5状態 | 第6状態 | ||
| 敵の攻撃技 | AFS | KR21A | KR22A | KR23A | KR24A | KR25A | KR26A |
| BFS | KR21B | KR22B | KR23B | KR24B | KR25B | KR26B | |
| 蹴り | KR21K | KR22K | KR23K | KR24K | KR25K | KR26K | |
| タックル | KR21T | KR22T | KR23T | KR24T | KR25T | KR26T | |