since 2003
イレコナビ サイトマップ
| 構え | ||
| 気態用 | 液態用 | 固態用 |
| 四つ足の構え | |||||||||
| 基本動作 | 装飾動作 | 少年部 | |||||||
| モード | 遷移 | 出方 | 入り方 | 手・腕 | 頭・首 | 胴体 | 足・脚 | 緩急 | |
| 胴の向き=右 | 胴の向き=左 | |
| 足 の 位 置 と 向 き |
 |
 |
| A F S 基 本 姿 勢 の 座 標 軸 |
 |
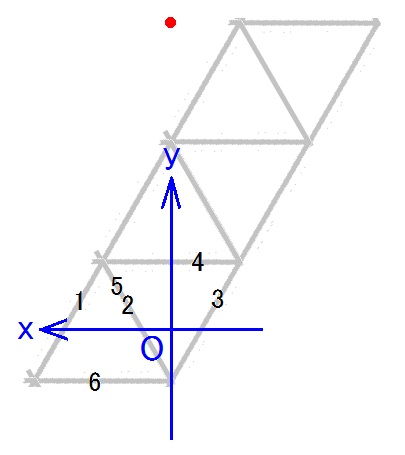 |
| 第4状態での両足(の中指の中足趾節関節)の位置 | (x, y) = (±0.5スネ, 0.5スネ) |
| AFS基本姿勢が完成するタイミング(打蹴技起動可能始)は、ホバー順回転の第2状態から第3状態への移行が完了した0.42秒後です。 |
各攻撃技のインパクトのタイミングの可能最早値(インパクト可能始)は、AFS基本姿勢が完成するタイミングよりも、各攻撃技の到達時間(起動からインパクトまでの時間)だけ遅い。
各攻撃技の到達時間は、今後の再測定によって更新される事が予想されるので、更新が有っても更新後の値が自動的に反映される様に、個別技のページの内容を以下に埋め込み表示しておきます。
| 独 立 式 縦 拳 直 打 |
|
| 連 動 式 短 前 直 打 |
|
| 連 動 式 長 前 直 打 |
---
第4状態の私に連動式短前ストレート打ちを当てようとして失敗した敵にH3d2で返撃する事は、ホバー逆回転から出るH4d1と同様です。
私が第4状態に行かなくても敵は私の第4状態を攻撃しようと踏み込むかもしれないが、私が第4状態に行かなければ敵は踏み込んだ後AFSを実行しないのではないか。
しかし、私のホバー順回転の回転速度が大きければ、私が第4状態に到達する前に連動式短前ストレート打ちの動作を開始する必要が敵には生じるので、敵が連動式短前ストレート打ちを空振りしてしまう事を期待できる。
したがって、第4状態の私に連動式短前ストレート打ちを当てようとして失敗した敵にH3d2で返撃する事は、ホバー順回転の回転速度を予め上げておく事とセットで計画されるべきだろう。
ホバー逆回転から出るH4d1に比べて、ホバー順回転から出るH3d2の方が、敵が引っ掛かり難いが、着地姿勢を完成させる為に使える時間的な余裕が大きく、その分しっかり打てる。
---
第5状態の私に連動式短前ストレート打ちを当てようとしている敵をH3c2で迎撃する事も考えられる。
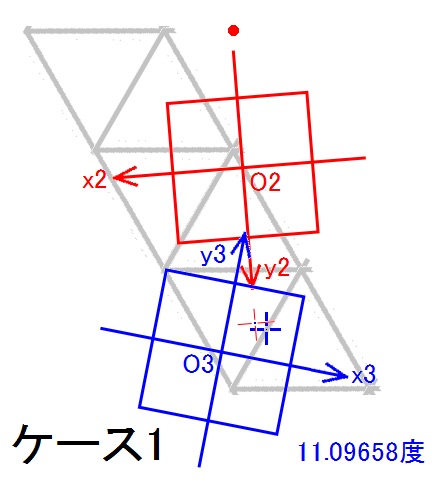
ポジショニング・アナライザーを使った分析結果は以下です。
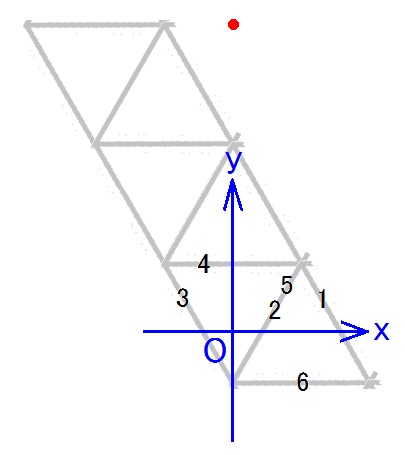
x1-y1-O1としては、第5状態レの字立ちの座標系を使いました。
| ケース1 | ||
| 入 力 |
direction of x1 and x2 same(1) or opposite(-1)? | 1 |
| x1 of my part x1a=? | 0.08 | |
| y1 of my part y1a=? | 0.04 | |
| x2 of my part x2b=? | 0 | |
| y2 of my part y2b=? | 1.12 | |
| x2 of his part x2a=? | -0.03 | |
| y2 of his part y2a=? | 0.15 | |
| x1 of his home x1c= ? | 0.25 | |
| y1 of his home y1c/SQR(3)=? | 1.25 | |
| x2 of his home x2c=? | 0 | |
| angle of y1 tht1=? | 0 | |
| direction of x1 and x3 same(1) or opposite(-1)? | -1 | |
| x3 of my pole x3a=? | -0.5 | |
| y3 of my pole y3a=? | 0.5 | |
| x1 of my pole x1d=? | 0.75 | |
| y1 of my pole y1d/SQR(3)=? | 0.25 | |
| angle of y3 tht3 input(1) or not(0)? | ||
| angle of y3 tht3=? (前項で1を入力した場合にのみ表示される) |
0 | |
| 出 力 |
angle of -y2 tht2= | -4.573789 |
| x1 of his part x1b= | 0.1274461 | |
| y1 of his part y1b= | 1.009303 | |
| angle of y3 tht3= | 11.09658 | |
| x3 of his part x3b= | 2.235174×10-8, 1.1225539(θ3=0) |
|
| y3 of his part y3b= | 1.185335, 1.076291(θ3=0) |
|
| distance of his part= | 1.185335, 1.083246(θ3=0) |