since 2003
イレコナビ サイトマップ
| 構え | ||
| 気態用 | 液態用 | 固態用 |
| 四つ足の構え | |||||||||
| 基本動作 | 装飾動作 | 少年部 | |||||||
| モード | 遷移 | 出方 | 入り方 | 手・腕 | 頭・首 | 胴体 | 足・脚 | 緩急 | |
| 胴の向き=右 | 胴の向き=左 | |
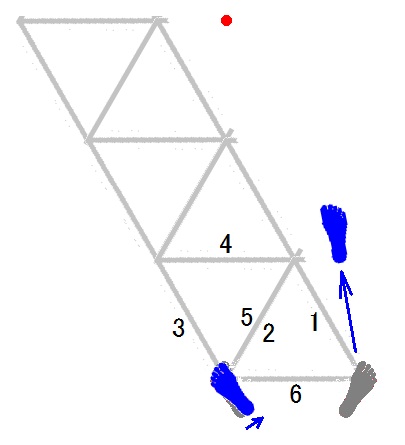
| 足 の 位 置 と 向 き |
 |
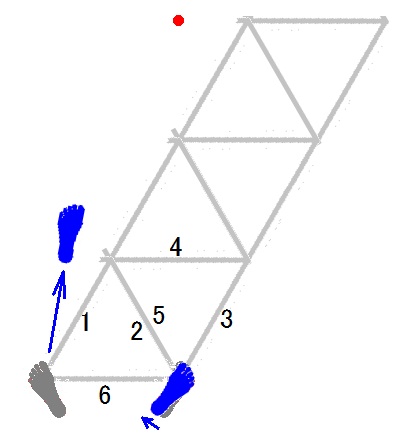 |
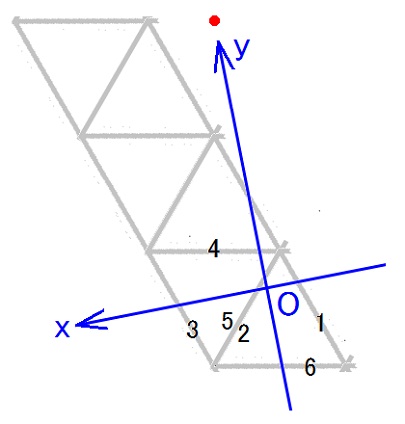
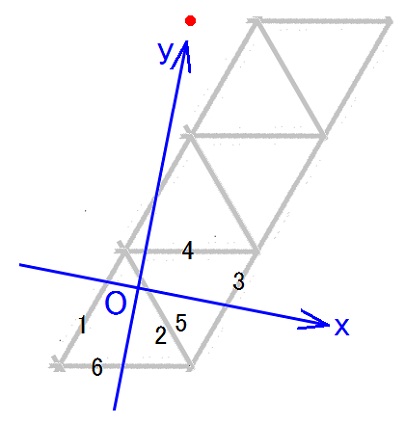
| A F S 基 本 姿 勢 の 座 標 軸 |
 |
 |
| 地面から離さない方の 足(の中指の中足趾節関節)の位置 |
(x, y) = (0.5スネ, -0.5スネ) |
| AFS基本姿勢が完成するタイミング(打蹴技起動可能始)は、ホバー逆回転の第1状態から第6状態への移行が完了した0.58秒後です。 |
各攻撃技のインパクトのタイミングの可能最早値(インパクト可能始)は、AFS基本姿勢が完成するタイミングよりも、各攻撃技の到達時間(起動からインパクトまでの時間)だけ遅い。
各攻撃技の到達時間は、今後の再測定によって更新される事が予想されるので、更新が有っても更新後の値が自動的に反映される様に、個別技のページの内容を以下に埋め込み表示しておきます。
| 独 立 式 縦 拳 直 打 |
|
| 連 動 式 短 前 直 打 |
|
| 連 動 式 長 前 直 打 |
---
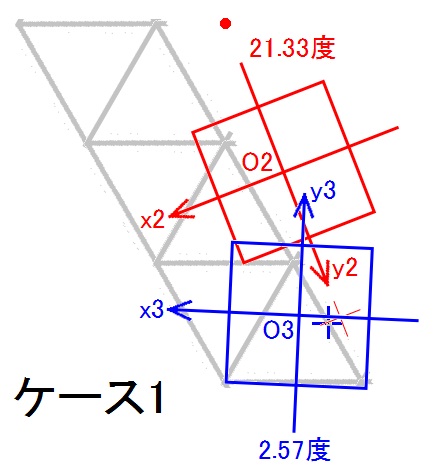
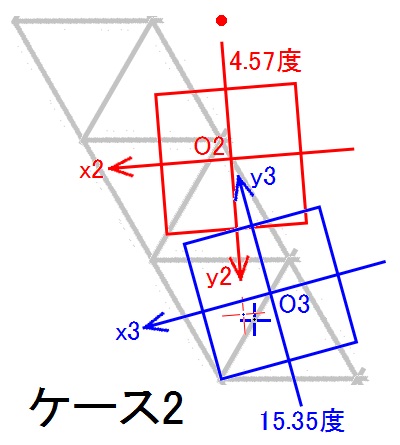
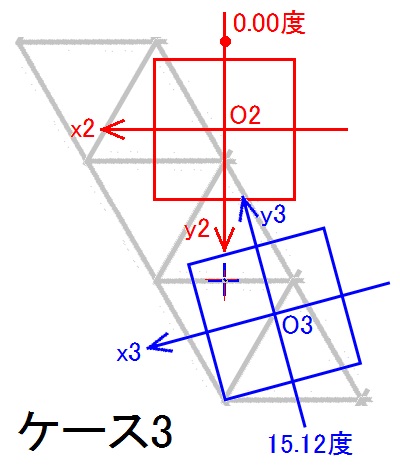
ポジショニング・アナライザーを使った分析結果は以下です。
| ケース1 | ケース2 | ケース3 | ケース4 | ケース5 | ケース6 | ケース7 | ケース8 | ||
| 入 力 |
direction of x1 and x2 same(1) or opposite(-1)? | -1 | 1 | -1 | -1 | -1 | 1 | -1 | 1 |
| x1 of my part x1a=? | 0.08 | 0.08 | 0 | 0 | 0.08 | 0.08 | 0.08 | 0.08 | |
| y1 of my part y1a=? | 0.04 | 0.04 | 0.01 | 0.01 | 0.04 | 0.04 | 0.04 | 0.04 | |
| x2 of my part x2b=? | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | |
| y2 of my part y2b=? | 1.12 | 1.12 | 1.08 | 1.08 | 1.12 | 1.12 | 1.12 | 1.12 | |
| x2 of his part x2a=? | -0.04 | -0.03 | -0.03 | 0 | -0.02 | -0.02 | -0.20 | -0.20 | |
| y2 of his part y2a=? | 0.27 | 0.15 | 0.15 | -0.03 | 0.04 | 0.04 | -0.01 | -0.01 | |
| x1 of his home x1c= ? | -0.75 | 0.25 | 0 | -0.5 | -0.75 | 0.25 | -0.75 | 0.25 | |
| y1 of his home y1c/SQR(3)=? | 1.25 | 1.25 | 1 | 1.5 | 1.25 | 1.25 | 1.25 | 1.25 | |
| x2 of his home x2c=? | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | |
| angle of y1 tht1=? | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | |
| direction of x1 and x3 same(1) or opposite(-1)? | -1 | 1 | -1 | -1 | -1 | 1 | -1 | 1 | |
| x3 of my pole x3a=? | 0.5 | 0.5 | 0.5 | 0.5 | 0.5 | 0.5 | 0.5 | 0.5 | |
| y3 of my pole y3a=? | -0.5 | -0.5 | -0.5 | -0.5 | -0.5 | -0.5 | -0.5 | -0.5 | |
| x1 of my pole x1d=? | -0.75 | 0.25 | 0 | -0.5 | -0.75 | 0.25 | -0.75 | 0.25 | |
| y1 of my pole y1d/SQR(3)=? | -0.25 | -0.25 | -0.5 | 0 | -0.25 | -0.25 | -0.25 | -0.25 | |
| x3 of his part x3b=? | 0 | 0 | 0 | -0.22 | 0 | 0 | 0 | 0 | |
| angle of y3 tht3=? | 29.84 | -2.574113 | -15.35068 | -2.574113 | -15.35068 | ||||
| 出 力 |
angle of -y2 tht2= | 21.33447 | -4.573789 | 0 | 10.93448 | 21.33447 | -4.573789 | 21.33447 | -4.573789 |
| x1 of his part x1b= | -0.1919808 | 0.1274461 | 0.03 | -0.2105517 | -0.2942868 | 0.146186 | -0.1448124 | -0.02925367 | |
| y1 of his part y1b= | 0.8463041 | 1.009303 | 0.9400001 | 1.099848 | 1.053267 | 1.118156 | 1.165326 | 1.18235 | |
| angle of y3 tht3= | -2.574113 | -15.35068 | 15.11843 | 24.53346 | 1.71538 | -14.93194 | -3.727412 | -7.950417 | |
| x3 of his part x3b= | 0 | 0 | 0 | -0.22(θ3=24.53346), -0.2983341(θ3=29.84) |
0(θ3=1.71538), 0.1114979(θ3=-2.574113) |
0(θ3=-14.93194), -0.01074466(θ3=-15.35068) |
0(-3.727412), -0.032793(-2.574113) |
0(-7.950417), -0.1969192(-15.35068) |
|
| y3 of his part y3b= | 0.8030874 | 0.8584163 | 1.235692 | 0.3803662(θ3=24.53346), 0.3100045(θ3=29.84) |
0.9719716(θ3=1.71538), 1.005246(θ3=-2.574113) |
0.9720393(θ3=-14.93194), 0.9683459(θ3=-15.35068) |
1.134301(-3.727412), 1.123906(-2.574113) |
1.061211(-7.950417), 0.9838067(-15.35068) |
|
| my pole his part distance= | 1.395721 | 1.447513 | 1.806274 | 1.137297 | 1.554574 | 1.554638 | 1.709075 | 1.639323 |
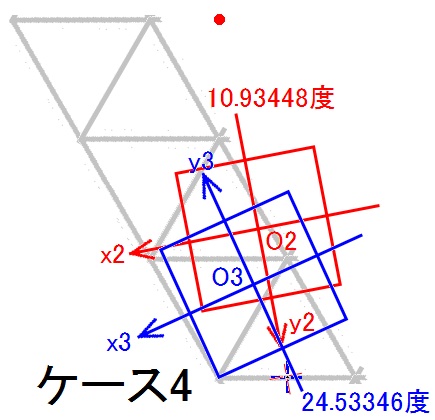

ケース4のy3bの値0.38スネは敵の天突(胸骨上端)の値です。
連動式長前ストレート打ちの終状態での肩の高さはそれよりも少し低いので、胸骨が下に行くほど前に出ている事を考えれば、連動式長前ストレート打ちのエッヂの到達位置のy座標0.37スネはそれより小さいけれど、私の肩は敵の胸骨に当たるだろう。
それでも、連動式長前ストレート打ちの標的の最適位置のy座標0.31スネよりも接触点のy座標の方がハッキリ大きい。
y3bの値を0.31スネにするには、θ3=29.84度にする必要がある事が分かった。
θ3=29.84度にすれば、基本デザイン通りの連動式長前ストレート打ちの動きで、フォームを全く崩さずに敵の胸骨に私の肩を当てる事が出来るだろう(断定しないのは、x3bの値の事もあるからです)。
しかし、そんな事をしなくても、上体を敵の方に傾けて肩をぶつければ、θ3=24.53346, x3b=-0.22スネ(標的の最適位置)の条件を変更する必要は無い。
どちらの方が良いだろうか。
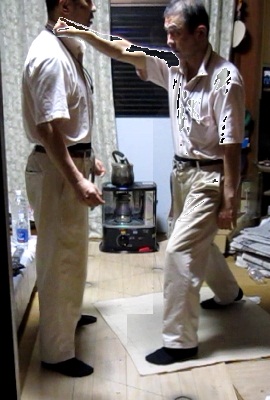
写真の位置関係では、ヘッディングも可能、腰当ても可能、金的打ちは無理、肘尻打ちは可能である事が写真から分かる。
以下の写真は、第6状態の私のアゴを敵が正拳連動式短前ストレート打ちで打ち抜いている様子です。
ケース4では、この立ち位置の敵を迎撃する事を考えています。
肩を当てる連動式長前ストレート打ちが、計算では少しリーチ不足のはずなのに、写真ではリーチ過大に見えるのは何故でしょうか。
裸で撮影して調べてみました。
裸の写真で見ると、分析結果の数字との矛盾は無い様です。

ケース5とケース6では、敵のミゾオチを打つ事を考えています。
敵の前足=左足、私の前足=右足であるために、私が左正拳を敵の肋骨前足側下端前部に当てるのは、あまり有効ではないだろう。
分析結果の数字を見ると、x3b=0としても、θ3値としてケース1やケース2の値を指定しても、どちらでも、私が連動式短前ストレート打ちで左正拳を敵のミゾオチに当てる事は有効だと判断できる。
ただし、敵のミゾオチは正拳連動式短前ストレート打ちの標的の最適位置よりも少し近い。
しかし、敵のミゾオチの位置は独立式縦正拳長前ストレート打ちのエッヂの到達位置ぐらいなので、独立式縦正拳長前ストレート打ちの方が良いというわけではない。
ただし、独立式縦正拳長前ストレート打ちも、姿勢を少し崩せば十分に実行可能です。
ケース1(ケース5)、ケース2(ケース6)の代案として私が独立式縦正拳長前ストレート打ちを敵の肋骨前足側下端前部に当てる事が出来ないかをケース7とケース8で調べてみた。
ケース7の方は「出来ない」という結果、ケース8の方は「θ3値としてケース2の値を指定して姿勢を少し崩せば出来る」という結果に成っている。
ケース2、ケース6、ケース8の3つは、θ3=-15度ぐらいで連打できるのではないか。
| 敵が標的にする | 敵の攻撃技 | 私が標的にする | 私の攻撃技 | θ3 (度) |
ケ | ス 番 号 |
|||||||||
| 私の状態 (x1-y1-O1) |
私の身体部位 (x1a, y1a) (x2b, y2b) |
動き | エッヂ | 敵の姿勢 (x2-y2-O2) |
敵の身体部位 (x2a, y2a) (x1b, y1b) (x3b, y3b) |
動き | エッヂ | 時 | ||||||
| 胴 の 向 き |
状 態 番 号 |
x1 軸 の 向 き |
姿勢 | タイプ | 前足 | |||||||||
| 右 | 1 | 右 | レの字立ち | アゴ | 連動式短前直打 | 右正拳 | 連動式短前直打の終状態 | 左足 | アゴ | 独立式縦拳短前直打 | 左正拳 | 返撃 | -2.57 | 1 |
| AFS基本姿勢 | 左足 | ノド | 独立式縦拳長前直打 | 右正拳 | 返撃 | |||||||||
| AFS基本姿勢 | 左足 | ミゾオチ | 連動式短前直打 | 左正拳 | 返撃 | 1.72 | 5 | |||||||
| 右 | 6 | 右 | 外八字立ち | アゴ | 連動式短前直打 | 右正拳 | AFS基本姿勢 | 左足 | 胸骨 | 連動式長前直打 | 右肩 | 迎撃 | 24.53 | 4 |
| 右 | 5 | 左 | レの字立ち | アゴ | 連動式短前直打 | 右正拳 | AFS基本姿勢 | 左足 | アゴ | 独立式縦拳短前直打 | 左正拳 | 迎撃 | -15.35 | 2 |
| AFS基本姿勢 | 左足 | ノド | 独立式縦拳長前直打 | 右正拳 | 迎撃 | |||||||||
| AFS基本姿勢 | 左足 | 肋骨前足側下端前部 | 独立式縦拳長前直打 | 右正拳 | 迎撃 | -15.35 | 8 | |||||||
| AFS基本姿勢 | 左足 | ミゾオチ | 連動式短前直打 | 左正拳 | 迎撃 | -14.93 | 6 | |||||||
| 右 | 4 | 右 | 外八字立ち | アゴ | 連動式短前直打 | 右正拳 | AFS基本姿勢 | 左足 | アゴ | 連動式短前直打 | 左正拳 | 迎撃 | 15.12 | 3 |