since 2003
イレコナビ サイトマップ
| 構え | ||
| 気態用 | 液態用 | 固態用 |
| 四つ足の構え | |||||||||
| 基本動作 | 装飾動作 | 少年部 | |||||||
| モード | 遷移 | 出方 | 入り方 | 手・腕 | 頭・首 | 胴体 | 足・脚 | 緩急 | |
| 胴の向き=右 | 胴の向き=左 | |
| 足 の 位 置 と 向 き |
 |
 |
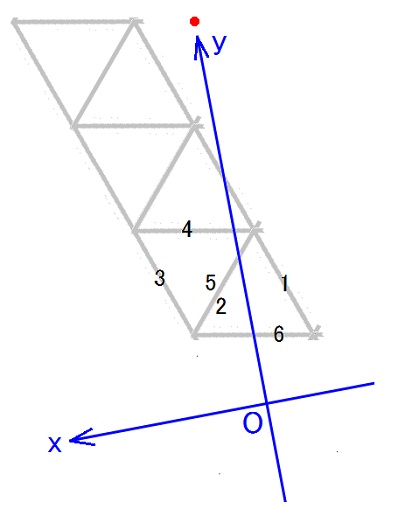
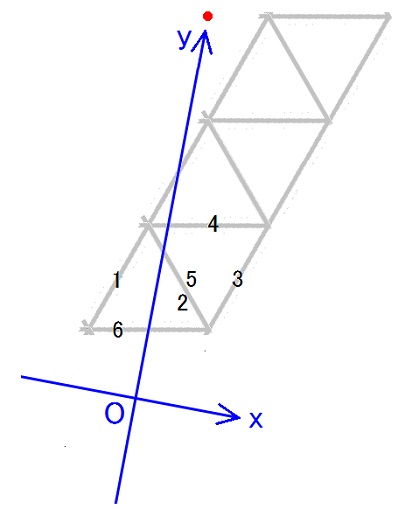
| A F S 基 本 姿 勢 の 座 標 軸 |
 |
 |
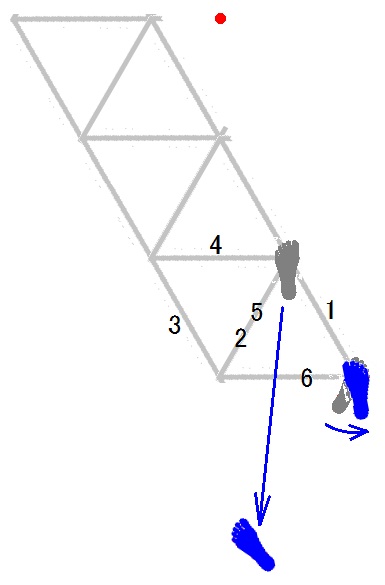
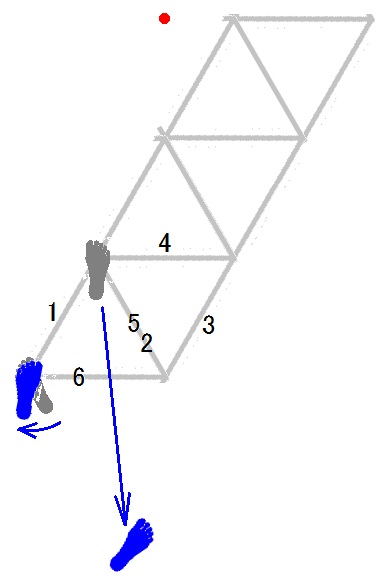
| 地面から離さない方の 足(の中指の中足趾節関節)の位置 |
(x, y) = (-0.5スネ, 0.5スネ) |
| AFS基本姿勢が完成するタイミング(打蹴技起動可能始)は、ホバー逆回転の第2状態から第1状態への移行が完了した0.81秒後です。 |
各攻撃技のインパクトのタイミングの可能最早値(インパクト可能始)は、AFS基本姿勢が完成するタイミングよりも、各攻撃技の到達時間(起動からインパクトまでの時間)だけ遅い。
各攻撃技の到達時間は、今後の再測定によって更新される事が予想されるので、更新が有っても更新後の値が自動的に反映される様に、個別技のページの内容を以下に埋め込み表示しておきます。
| 独 立 式 縦 拳 直 打 |
|
| 連 動 式 短 前 直 打 |
|
| 連 動 式 長 前 直 打 |
---
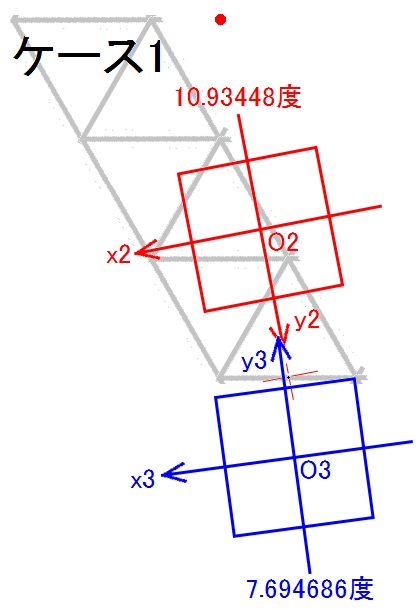
ポジショニング・アナライザーを使った分析結果は以下です。
| ケース1 | ||
| 入 力 |
direction of x1 and x2 same(1) or opposite(-1)? | -1 |
| x1 of my part x1a=? | 0 | |
| y1 of my part y1a=? | 0.01 | |
| x2 of my part x2b=? | 0 | |
| y2 of my part y2b=? | 1.08 | |
| x2 of his part x2a=? | -0.04 | |
| y2 of his part y2a=? | 0.27 | |
| x1 of his home x1c= ? | -0.5 | |
| y1 of his home y1c/SQR(3)=? | 1.5 | |
| x2 of his home x2c=? | 0 | |
| angle of y1 tht1=? | 0 | |
| direction of x1 and x3 same(1) or opposite(-1)? | -1 | |
| x3 of my pole x3a=? | -0.5 | |
| y3 of my pole y3a=? | 0.5 | |
| x1 of my pole x1d=? | 0.5 | |
| y1 of my pole y1d/SQR(3)=? | 0 | |
| x3 of his part x3b=? | 0 | |
| angle of y3 tht3=? | ||
| 出 力 |
angle of -y2 tht2= | 10.93448 |
| x1 of his part x1b= | -0.1143721 | |
| y1 of his part y1b= | 0.8128817 | |
| angle of y3 tht3= | 7.694686 | |
| x3 of his part x3b= | ||
| y3 of his part y3b= | 1.387823 | |
| my pole his part distance= | 1.018935 |
| 敵が標的にする | 敵の攻撃技 | 私が標的にする | 私の攻撃技 | θ3 (度) |
ケ | ス 番 号 |
|||||||||
| 私の状態 (x1-y1-O1) |
私の身体部位 (x1a, y1a) (x2b, y2b) |
動き | エッヂ | 敵の姿勢 (x2-y2-O2) |
敵の身体部位 (x2a, y2a) (x1b, y1b) (x3b, y3b) |
動き | エッヂ | 時 | ||||||
| 胴 の 向 き |
状 態 番 号 |
x1 軸 の 向 き |
姿勢 | タイプ | 前足 | |||||||||
| 右 | 6 | 右 | 外八字立ち | アゴ | 連動式短前直打 | 右正拳 | 連動式短前直打の終状態 | 左足 | アゴ | 連動式長前直打 | 右正拳 | 返撃 | 7.69 | 1 |