since 2003
イレコナビ サイトマップ
| 構え | ||
| 気態用 | 液態用 | 固態用 |
| 四つ足の構え | |||||||||
| 基本動作 | 装飾動作 | 少年部 | |||||||
| モード | 遷移 | 出方 | 入り方 | 手・腕 | 頭・首 | 胴体 | 足・脚 | 緩急 | |
| 胴の向き=右 | 胴の向き=左 |
 |
 |
| 蹴りの軸足(の中指の中足趾節関節) から標的の元の位置の直下までの距離 |
1.803スネ |
従って、標的の最適位置(直下)から標的の元の位置(直下)までの距離 ≒ 1.803スネ - (蹴りの到達距離).
| リーチの不足量 ≒ 1.803スネ - (蹴りの到達距離) |
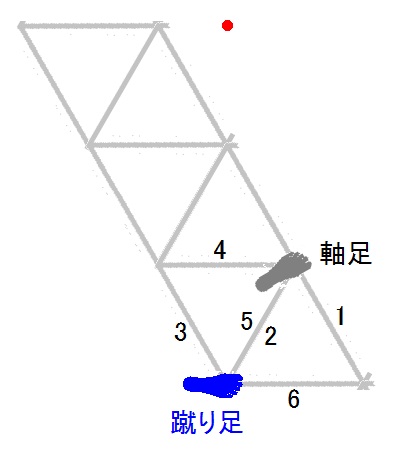
| 後 回 蹴 |
蹴りのインパクトのタイミングの可能最早値(インパクト可能始)は、第2状態基本形が完成するタイミングよりも、蹴りの到達時間(起動からインパクトまでの時間)だけ遅い。
蹴りの到達時間は、今後の再測定によって更新される事が予想されるので、更新が有っても更新後の値が自動的に反映される様に、個別技のページの内容を以下に埋め込み表示しておきます。
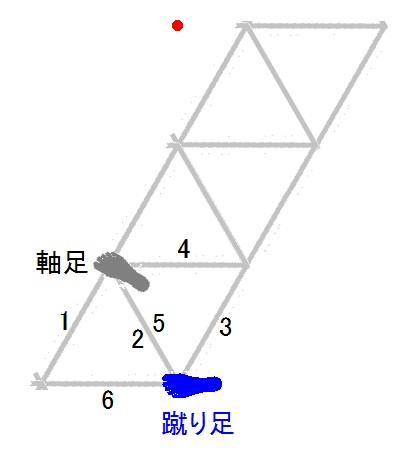
| 後 回 蹴 |
F2b2では、第2状態基本形から蹴り動作(角運動量の補給)を始めるが、第2状態後形に到達するまで蹴り足を離陸させない方が上手く行くという実感を得た。
ただし、第2状態後形で一時停止すると上手く行かない、という実感も得た。
蹴り足を離陸させるタイミングは、両足の大腿の内側が互いに触れ合ってから(第2状態後形より少し後)にすべきであり、それより早く離陸させると股関節に痛みが出る、と体感した。
角運動量の補給を最大化したい場合には腕の振りも併用する。
ターボ腕振りとしては、回し蹴りの角運動量補給の腕振りの1から2までを四つ足の構え第2状態の基本形で行ない、2から3までは全身回転と同時に行なう。
けれど、胴体の回転を腕振りよりも先行させる間違いを犯しがちなので、分解練習ではまず胴体を回転させず腕だけ最後まで振り、腕を振り終わった後で胴体を回転させる。
腕振りと胴体の回転を同時並行で、というのがデザインなんだけど、気持ちとしては、腕振りを先行させるつもりでやるのが正しく、実際にそういう動きに成ってしまっても構わないと思う。
ターボ腕振りの始状態を作るには、四つ足の構え逆回転の第3状態から第2状態への移行を、両腕を残して胴と脚だけ回す感じでやる。
腕を逆向きに回してその反動?で胴と脚を回す、という事までしない方が良い、と体感した。