since 2003
イレコナビ サイトマップ
| 構え | ||
| 気態用 | 液態用 | 固態用 |
| 四つ足の構え | |||||||||
| 基本動作 | 装飾動作 | 少年部 | |||||||
| モード | 遷移 | 出方 | 入り方 | 手・腕 | 頭・首 | 胴体 | 足・脚 | 緩急 | |
| 胴の向き=右 | 胴の向き=左 |
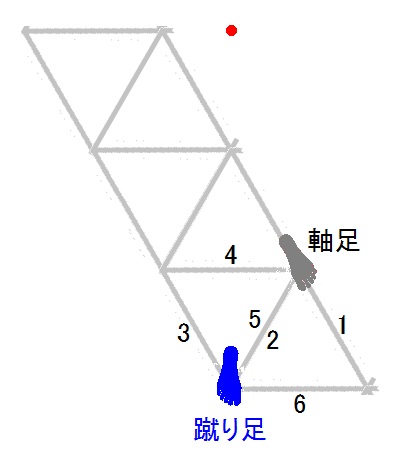 第2状態後形 |
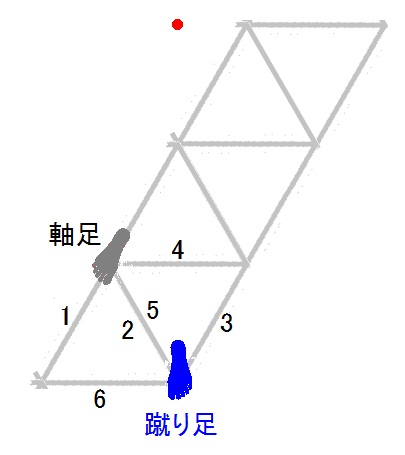 第2状態後形 |
| 蹴りの軸足(の中指の中足趾節関節) から標的の元の位置の直下までの距離 |
1.803スネ |
従って、標的の最適位置(直下)から標的の元の位置(直下)までの距離 ≒ 1.803スネ - (蹴りの到達距離).
| リーチの不足量 ≒ 1.803スネ - (蹴りの到達距離) |
| 長 後 蹴 |
蹴りのインパクトのタイミングの可能最早値(インパクト可能始)は、第2状態後形が完成するタイミングよりも、蹴りの到達時間(起動からインパクトまでの時間)だけ遅い。(後述する理由によって、長後蹴の場合は、これは成り立ちません)
蹴りの到達時間は、今後の再測定によって更新される事が予想されるので、更新が有っても更新後の値が自動的に反映される様に、個別技のページの内容を以下に埋め込み表示しておきます。
| 長 後 蹴 |
インパクトの瞬間に軸足のカカトがシッカリ標的の方に向いている様にする。
軸足のカカトが外に開いていると私は蹴りで軸脚の付け根内側に痛みを感じる。
F2b1は、第2状態後形を完成させた後で後ろ蹴りをスタートすると軸足爪先の向きが悪い、と体感した。
かと言って、後ろ回し蹴りではないので、回転しながら蹴るのではなくて回転した後で蹴るのが正しい。
これら両立しない2つを妥協させて共存させた様な蹴り方が正しい様だ、と体感した。
「回転しながら蹴る」対「回転した後で蹴る」を1対9の比で混在させた様な蹴り方を私は試しています。
ホバー逆回転(胴の向き=右)から出る場合で説明すると、第3状態からまず第2状態基本形に移行し、第2状態基本形から両足接地のまま第2状態後形に移行する回転を途中まで行ない、第2状態後形に到達する前に右足を離陸させ、左足(軸足)爪先の向きが第2状態後形での向きを少し行き過ぎた瞬間に後ろ蹴りを開始する。
この蹴りを後ろ回しフック蹴りみたいに蹴る人が多いと思うんだけど、私は後ろ回し蹴りではなく後ろ蹴りなんだという事にこだわって、蹴り足が軸脚に近い位置を通過する様に心がけています。
その方が、全身回転の角速度が大きく成り、蹴り動作開始およびインパクトが早まる、と思って。
その後、第3状態から離陸させた左足が着陸した時には既に第2状態後形の一歩手前の向きまで全身回転が進んでいる様に全身回転を前倒し実行する事によって、蹴り動作開始およびインパクトをさらに早める、という方式に改良しました。
さらに、その後、第3状態から離陸させた左足の移動経路を直線から曲線(途中右足に近付ける双曲線)に変更して、良い手応えを体感している。
インパクトの瞬間に軸足のカカトがシッカリ標的の方に向いている様にする。
軸足のカカトが外に開いていると私は蹴りで軸脚の付け根内側に痛みを感じる。
全身回転では、以下の写真の様な光景を見る様に意識し(つまり半ば視覚を失う感じで全体を漠然と見)て、そこから回転角を直感的に感じ取る様にすると、回転角を間違えない気がする(検証中)。

また、この光景を見ている間はまだ蹴りの事を考えない、身体転向に専念する。
そうしないと蹴り動作でバランスを崩す、と私は体感した。
動き始めでは顔の向きの変化を胴の向きの変化より先行させるのが正しいか検討中。
F2b1のタイプの蹴りは上級者向きだ、と上田幹雄さんがYouTubr動画で言うのを聞いて、第2状態後形を完成させた後で後ろ蹴りをスタートすれば上級者でなくても出来るから自分はまずそれから始めよう、と思ったが、やってみると、それでは拙い動きに成ってしまった。
やってみて、上級者向きだと言われるのは何故か、が分かった気がする。