since 2003
イレコナビ サイトマップ
| 気態用 | 液態用 | 固態用 |
---
横切替の練習
左右に隣接する区画のホバーに切り替える。
続行切替と反転切替の両方を練習する。
反転切替では、スキップあるの場合とスキップ無しの場合の両方を練習する。
いずれも、胴の向き=右の場合と胴の向き=左の場合の両方を練習する。
| 胴の向き=右 | 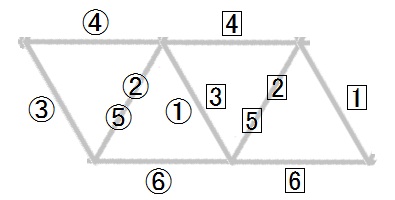 |
| 胴の向き=左 | 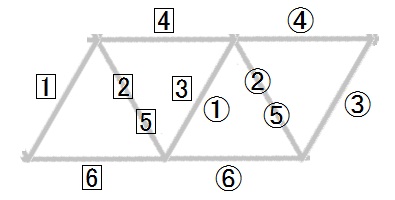 |
| 続行切替 | (順回転) ↓↑ [順回転] |
(1) → (2) → (3) → (4) → (5) → (6) → (1)=[3] → [4] → [5] → [6] → [1] → [2] → [3]=(1) → (2) → (3) → (4) → (5) → (6) |
|
| 反転切替 | (順回転) ↓↑ [逆回転] |
スキップなし | → (1)=[3] → [2] → [1] → [6] → [5] → [4] → [3]=(1) → (2) → (3) → (4) → (5) |
| スキップあり | → (6) →→ [2] → [1] → [6] → [5] → [4] →→ (2) → (3) → (4) → (5) → (6) → (1) → (2) |
||
| 続行切替 | (逆回転) ↓↑ [逆回転] |
(1) → (6) → (5) → (4) → (3) → (2) → (1)=[3] → [2] → [1] → [6] → [5] → [4] → [3]=(1) → (6) → (5) → (4) → (3) → (2) |
|
| 反転切替 | (逆回転) ↓↑ [順回転] |
スキップなし | → (1)=[3] → [4] → [5] → [6] → [1] → [2] → [3]=(1) → (6) → (5) → (4) → (3) |
| スキップあり | → (2) →→ [4] → [5] → [6] → [1] → [2] →→ (6) → (5) → (4) → (3) → (2) → (1) → (6) |
||
2026年01月30日までは、片側2周ずつ行なっていましたが、2026年01月下旬からの練習メニュー変更で、練習項目の個数が増えたので、2026年01月31日付けで片側1周ずつに減量しました。
横切替@遷移@基本動作@四つ足の構え@液態用@構え@デザイン例@理論
四つ足の構え練習(ホバーホバー切替)2025年04月18日撮影分@液態用ステップ@空手の技@動画
------
横直進の練習
以下の練習を、胴の向き=右の場合と胴の向き=左の場合の両方について行なう。
| 胴の向き=右 | 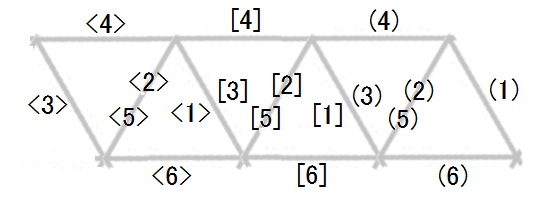 |
| 胴の向き=左 | 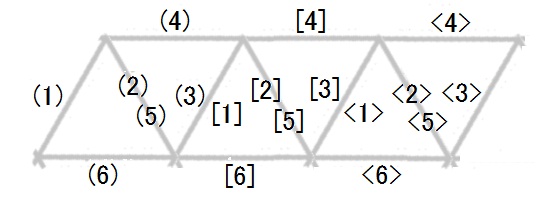 |
| 覚え方 | |||
| ホバー順回転+続行切替 | <3> → <4> → <5> → <6> → <1>=[3] → [4] → [5] → [6] → [1]=(3) → (4) → (5) → (6) → (1) | 1倍速→1倍速→1倍速 | 全 状 態 を 基 本 形 で |
| ホバー逆回転+続行切替 | =(1) → (6) → (5) → (4) → (3)=[1] → [6] → [5] → [4] → [3]=<1> → <6> → <5> → <4> → <3> | ||
| 順逆混合・反転切替(有スキップ) | =<3> → <4> → <5> → <6> →→ [2] →→ (4) → (5) → (6) → (1) | 1倍速→3倍速→1倍速 | |
| =(1) → (6) → (5) → (4) →→ [2] →→ <6> → <5> → <4> → <3> | |||
| ホバー逆回転+続行切替 | =<3> → <2> → <1>=[3] → [2] → [1]=(3) → (2) → (1) | 2倍速→2倍速→2倍速 | |
| ホバー順回転+続行切替 | =(1) → (2) → (3)=[1] → [2] → [3]=<1> → <2> → <3> | ||
| 順逆混合・反転切替(無スキップ) | =<3> → <2> → <1>=[3] → [4] → [5] → [6] → [1]=(3) → (2) → (1) | 2倍速→1倍速→2倍速 | |
| =(1) → (2) → (3)=[1] → [6] → [5] → [4] → [3]=<1> → <2> → <3> | |||
| =<3> → <4> → <5> → <6> → <1>=[3] → [2] → [1]=(3) → (4) → (5) → (6) → (1) | 1倍速→2倍速→1倍速 | ||
| =(1) → (6) → (5) → (4) → (3)=[1] → [2] → [3]=<1> → <6> → <5> → <4> → <3> | |||
| 順逆混合・反転切替(有スキップ) | =<3> → <4> → <5> → <6> →→ [2] → [1]=(3) → (2) → (1) | 1倍速→2倍速→2倍速 | |
| =(1) → (6) → (5) → (4) →→ [2] → [3]=<1> → <2> → <3> | |||
| =<3> → <2> →→ [4] → [5] → [6] → [1]=(3) → (4) → (5) → (6) → (1) | 2倍速→1倍速→1倍速 | ||
| =(1) → (2) →→ [6] → [5] → [4] → [3]=<1> → <6> → <5> → <4> → <3> | |||
| ホバー逆回転+続行切替 | =<3> → <2> → <1>=[3] → [2] → [1]=(3) → (2) → (1) | 2倍速→2倍速→2倍速 | ピ ヴ ォ ッ ト 歩 き 部 分 を 胴 の 向 き || ヒ ト で |
| ホバー順回転+続行切替 | =(1) → (2) → (3)=[1] → [2] → [3]=<1> → <2> → <3> | ||
| 順逆混合・反転切替(無スキップ) | =<3> → <2> → <1>=[3] → [4] → [5] → [6] → [1]=(3) → (2) → (1) | 2倍速→1倍速→2倍速 | |
| =(1) → (2) → (3)=[1] → [6] → [5] → [4] → [3]=<1> → <2> → <3> | |||
| =<3> → <4> → <5> → <6> → <1>=[3] → [2] → [1]=(3) → (4) → (5) → (6) → (1) | 1倍速→2倍速→1倍速 | ||
| =(1) → (6) → (5) → (4) → (3)=[1] → [2] → [3]=<1> → <6> → <5> → <4> → <3> | |||
| 順逆混合・反転切替(有スキップ) | =<3> → <4> → <5> → <6> →→ [2] → [1]=(3) → (2) → (1) | 1倍速→2倍速→2倍速 | |
| =(1) → (6) → (5) → (4) →→ [2] → [3]=<1> → <2> → <3> | |||
| =<3> → <2> →→ [4] → [5] → [6] → [1]=(3) → (4) → (5) → (6) → (1) | 2倍速→1倍速→1倍速 | ||
| =(1) → (2) →→ [6] → [5] → [4] → [3]=<1> → <6> → <5> → <4> → <3> |
直進@モード@基本動作@四つ足の構え@液態用@構え@デザイン例@理論
四つ足の構え練習(直進、胴の向き=カニ)2025年04月18日撮影分@液態用ステップ@空手の技@動画