since 2003
イレコナビ サイトマップ
| 気態用 | 液態用 | 固態用 |
345共有型と561共有型のそれぞれについて、続行切替で「胴の向き=左」部分が逆回転で「胴の向き=右」部分が順回転の場合と、続行切替で「胴の向き=左」部分が順回転で「胴の向き=右」部分が逆回転の場合、それから有スキップ反転切替で左右両方順回転の場合と左右両方逆回転の場合を練習する。
続行切替では、片側2周の場合と片側1周の場合を練習する。
反転切替では、片側1周の場合と片側半周の場合を練習する。
したがって、全部で16種類の練習をする。
-----
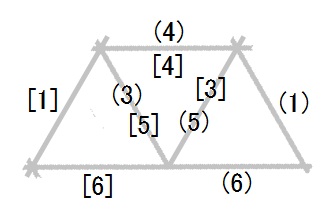
345共有型の場合
| 続 行 切 替 |
[逆回転]+(順回転) | 片側2周 | (5) → (6) → (1) → (2) → (3) → (4) → (5) → (6) → (1) → (2) → (3) → (4) → (5)=[3] → [2] → [1] → [6] → [5] → [4] → [3] → [2] → [1] → [6] → [5] → [4] → [3]=(5) → (6) → (1) → (2) → (3) |
| → (4) → (5) → (6) → (1) → (2) → (3) → (4)=[4] → [3] → [2] → [1] → [6] → [5] → [4] → [3] → [2] → [1] → [6] → [5] → [4]=(4) → (5) → (6) → (1) → (2) |
|||
| → (3) → (4) → (5) → (6) → (1) → (2) → (3)=[5] → [4] → [3] → [2] → [1] → [6] → [5] → [4] → [3] → [2] → [1] → [6] → [5]=(3) → (4) → (5) → (6) → (1) → (2) → (3) → (4) → (5) → (6) → (1) → (2) |
|||
| 片側1周 | (4) → (5) → (6) → (1) → (2) → (3) → (4)=[4] → [3] → [2] → [1] → [6] → [5] → [4]=(4) → (5) → (6) → (1) → (2) → (3) → (4)=[4] → [3] → [2] → [1] → [6] → [5] → [4]=(4) → (5) → (6) → (1) → (2) → (3) |
||
| [順回転]+(逆回転) | 片側2周 | [5] → [6] → [1] → [2] → [3] → [4] → [5] → [6] → [1] → [2] → [3] → [4] → [5]=(3) → (2) → (1) → (6) → (5) → (4) → (3) → (2) → (1) → (6) → (5) → (4) → (3)=[5] → [6] → [1] → [2] → [3] |
|
| → [4] → [5] → [6] → [1] → [2] → [3] → [4]=(4) → (3) → (2) → (1) → (6) → (5) → (4) → (3) → (2) → (1) → (6) → (5) → (4)=[4] → [5] → [6] → [1] → [2] |
|||
| → [3] → [4] → [5] → [6] → [1] → [2] → [3]=(5) → (4) → (3) → (2) → (1) → (6) → (5) → (4) → (3) → (2) → (1) → (6) → (5)=[3] → [4] → [5] → [6] → [1] → [2] → [3] → [4] → [5] → [6] → [1] → [2] |
|||
| 片側1周 | [4] → [5] → [6] → [1] → [2] → [3] → [4]=(4) → (3) → (2) → (1) → (6) → (5) → (4)=[4] → [5] → [6] → [1] → [2] → [3] → [4]=(4) → (3) → (2) → (1) → (6) → (5) → (4)=[4] → [5] → [6] → [1] → [2] → [3] |
| 覚え方 | ||||
| 有 ス キ ッ プ ・ 反 転 切 替 |
[順回転]+(順回転) | 片側半周 | (1) → (2) →→ [6] → [1] → [2] →→ (6) → (1) → (2) →→ [6] → [1] → [2] →→ (6) → (1) → (2) →→ [6] → [1] → [2] →→ (6) → (1) → (2) |
6→1→2の繰り返し |
| 片側1周 | (1) → (2) → (3) → (4) → (5) → (6) → (1) → (2) →→ [6] → [1] → [2]→ [3] → [4] → [5] → [6] → [1] → [2] →→ (6) → (1) → (2) → (3) → (4) → (5) → (6) → (1) → (2) →→ [6] → [1] → [2] → [3] → [4] → [5] → [6] → [1] → [2] →→ (6) → (1) → (2) → (3) → (4) → (5) → (6) |
6→1→2の繰り返しに 3→4→5を挿入する |
||
| [逆回転]+(逆回転) | 片側半周 | (1) → (6) →→ [2] → [1] → [6] →→ (2) → (1) → (6) →→ [2] → [1] → [6] →→ (2) → (1) → (6) →→ [2] → [1] → [6] →→ (2) → (1) → (6) |
2→1→6の繰り返し | |
| 片側1周 | (1) → (6) → (5) → (4) → (3) → (2) → (1) → (6) →→ [2] → [1] → [6] → [5] → [4] → [3] → [2] → [1] → [6] →→ (2) → (1) → (6) → (5) → (4) → (3) → (2) → (1) → (6) →→ [2] → [1] → [6] → [5] → [4] → [3] → [2] → [1] → [6] →→ (2) → (1) → (6) → (5) → (4) → (3) → (2) |
2→1→6の繰り返しに 5→4→3を挿入する |
(2)または[2]で終わった時には、敵に近い方の腕で脇腹ガード、敵から遠い方の腕で逆側頬ガードを同時に両方形成する。
(4)[4]や(6)[6]で終わった時は前蹴りを実行する。
片側2周の練習には、(5)=[3]で切り替えるのと(4)=[4]で切り替えるのと(3)=[5]で切り替えるのが3つとも入っています。
どこで切り替えても、頭で何を考えるかが違うだけで、動きは同じです。
片側1周の練習では、常に(4)=[4]で切り替えます。
-----
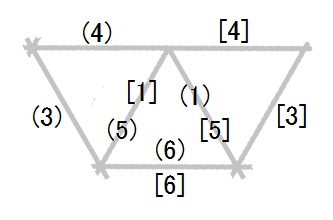
561共有型の場合
| 続 行 切 替 |
[逆回転]+(順回転) | 片側2周 | (1) → (2) → (3) → (4) → (5) → (6) → (1) → (2) → (3) → (4) → (5) → (6) → (1)=[5] → [4] → [3] → [2] → [1] → [6] → [5] → [4] → [3] → [2] → [1] → [6] → [5]=(1) → (2) → (3) → (4) → (5) → (6) → (1) |
| → (2) → (3) → (4) → (5) → (6)=[6] → [5] → [4] → [3] → [2] → [1] → [6] → [5] → [4] → [3] → [2] → [1] → [6]=(6) → (1) → (2) → (3) → (4) → (5) → (6) |
|||
| → (1) → (2) → (3) → (4) → (5)=[1] → [6] → [5] → [4] → [3] → [2] → [1] → [6] → [5] → [4] → [3] → [2] → [1]=(5) → (6) → (1) → (2) → (3) → (4) → (5) → (6) → (1) → (2) → (3) → (4) |
|||
| 片側1周 | (6) → (1) → (2) → (3) → (4) → (5) → (6)=[6] → [5] → [4] → [3] → [2] → [1] → [6]=(6) → (1) → (2) → (3) → (4) → (5) → (6)=[6] → [5] → [4] → [3] → [2] → [1] → [6]=(6) → (1) → (2) → (3) → (4) → (5) |
||
| [順回転]+(逆回転) | 片側2周 | [1] → [2] → [3] → [4] → [5] → [6] → [1] → [2] → [3] → [4] → [5] → [6] → [1]=(5) → (4) → (3) → (2) → (1) → (6) → (5) → (4) → (3) → (2) → (1) → (6) → (5)=[1] → [2] → [3] → [4] → [5] → [6] → [1] |
|
| → [2] → [3] → [4] → [5] → [6]=(6) → (5) → (4) → (3) → (2) → (1) → (6) → (5) → (4) → (3) → (2) → (1) → (6)=[6] → [1] → [2] → [3] → [4] → [5] → [6] |
|||
| → [1] → [2] → [3] → [4] → [5]=(1) → (6) → (5) → (4) → (3) → (2) → (1) → (6) → (5) → (4) → (3) → (2) → (1)=[5] → [6] → [1] → [2] → [3] → [4] → [5] → [6] → [1] → [2] → [3] → [4] |
|||
| 片側1周 | [6] → [1] → [2] → [3] → [4] → [5] → [6]=(6) → (5) → (4) → (3) → (2) → (1) → (6)=[6] → [1] → [2] → [3] → [4] → [5] → [6]=(6) → (5) → (4) → (3) → (2) → (1) → (6)=[6] → [1] → [2] → [3] → [4] → [5] |
| 覚え方 | ||||
| 有 ス キ ッ プ ・ 反 転 切 替 |
[順回転]+(順回転) | 片側半周 | (3) → (4) →→ [2] → [3] → [4] →→ (2) (3) → (4) →→ [2] → [3] → [4] →→ (2) (3) → (4) →→ [2] → [3] → [4] →→ (2) → (3) → (4) |
2→3→4の繰り返し |
| 片側1周 | (3) → (4) → (5) → (6) → (1) → (2) → (3) → (4) →→ [2] → [3] → [4] → [5] → [6] → [1] → [2] → [3] → [4] →→ (2) → (3) → (4) → (5) → (6) → (1) → (2) → (3) → (4) →→ [2] → [3] → [4] → [5] → [6] → [1] → [2] → [3] → [4] →→ (2) → (3) → (4) → (5) → (6) → (1) → (2) |
2→3→4の繰り返しに 5→6→1を挿入する |
||
| [逆回転]+(逆回転) | 片側半周 | (3) → (2) →→ [4] → [3] → [2] →→ (4) (3) → (2) →→ [4] → [3] → [2] →→ (4) (3) → (2) →→ [4] → [3] → [2] →→ (4) → (3) → (2) |
4→3→2の繰り返し | |
| 片側1周 | (3) → (2) → (1) → (6) → (5) → (4) → (3) → (2) →→ [4] → [3] → [2] → [1] → [6] → [5] → [4] → [3] → [2] →→ (4) → (3) → (2) → (1) → (6) → (5) → (4) → (3) → (2) →→ [4] → [3] → [2] → [1] → [6] → [5] → [4] → [3] → [2] →→ (4) → (3) → (2) → (1) → (6) → (5) → (4) |
4→3→2の繰り返しに 1→6→5を挿入する |
胴向切替@遷移@基本動作@四つ足の構え@液態用@構え@デザイン例@理論
四つ足の構え練習(ホバー接続)2025年04月18日撮影分@液態用ステップ@空手の技@動画