since 2003
イレコナビ サイトマップ
| 構え | ||
| 気態用 | 液態用 | 固態用 |
| 四つ足の構え | |||||||||
| 基本動作 | 装飾動作 | 少年部 | |||||||
| モード | 遷移 | 出方 | 入り方 | 手・腕 | 頭・首 | 胴体 | 足・脚 | 緩急 | |
四つ足の構え(直進), 宇田作品番号=UWV20220613.
2022年06月13日発案。
定義更新2026年01月19日。
発案当初は直進をホバーとは独立のモードと考えていましたが、2025年12月15日に、直進は縦切替の繰り返しである、という風に、直進をホバーと遷移の組合せとして認識する分類法に改定しました。
直進を縦切替の繰り返しだと認識する事によって、それまで考え落としていた、以下の可能性に気付きました。
縦続行切替で逆回転ホバーをつなぐと、第6状態→第5状態→第4状態=第6状態→第5状態→第4状態=第6状態→・・・と成って、これでも前進できる。
縦続行切替で順回転ホバーをつなぐと、第4状態→第5状態→第6状態=第4状態→第5状態→第6状態=第4状態→・・・と成って、これでも後退できる。
これらは、胴の向きを微調整すると、普通の歩行と足の左右幅が少し違うだけです。
直進前進は順回転ホバーとしか、直進後退は逆回転ホバーとしか馴染まない、という固定観念が間違っているかもしれない。
私は、ホバーのどちらを順回転とするか、どちらを逆回転とするかを、それで決めていたんだけど。
| 胴の向き=右 | 胴の向き=左 |
 |
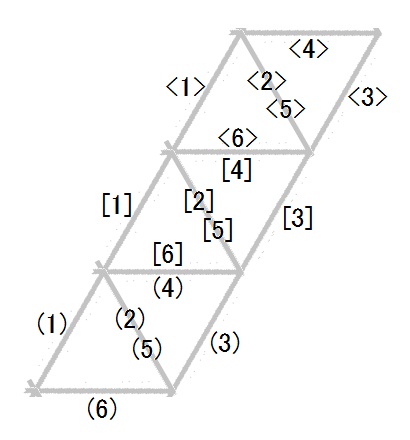 |
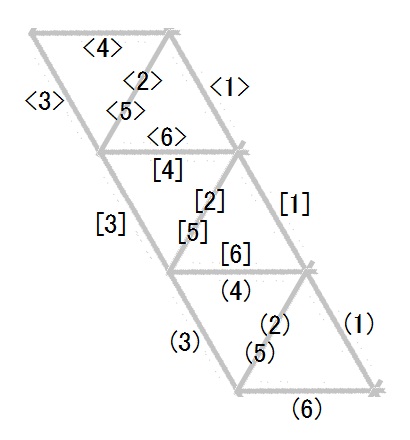
| 前進 | ホバー順回転+続行縦切替 | ・・・ → (6) → (1) → (2) → (3) → (4)=[6] → [1] → [2] → [3] → [4]=<6> → <1> → <2> → <3> → <4> → ・・・ |
| ホバー逆回転+続行縦切替 | ・・・ → (6) → (5) → (4)=[6] → [5] → [4]=<6> → <5> → <4> → ・・・ | |
| 順逆混合(反転縦切替・無スキップ) | ・・・ → (6) → (1) → (2) → (3) → (4)=[6] → [5] → [4]=<6> → <1> → <2> → <3> → <4> → ・・・ | |
| 順逆混合(反転縦切替・有スキップ) | ・・・ → (6) → (1) → (2) → (3) →→ [5] →→ <1> → <2> → <3> → <4> → ・・・ | |
| 後退 | ホバー逆回転+続行縦切替 | ・・・ → <4> → <3> → <2> → <1> → <6>=[4] → [3] → [2] → [1] → [6]=(4) → (3) → (2) → (1) → (6) → ・・・ |
| ホバー順回転+続行縦切替 | ・・・ → <4> → <5> → <6>=[4] → [5] → [6]=(4) → (5) → (6) → ・・・ | |
| 順逆混合(反転縦切替・無スキップ) | ・・・ → <4> → <3> → <2> → <1> → <6>=[4] → [5] → [6]=(4) → (3) → (2) → (1) → (6) → ・・・ | |
| 順逆混合(反転縦切替・有スキップ) | ・・・ → <4> → <3> → <2> → <1> →→ [5] →→ (3) → (2) → (1) → (6) → ・・・ |
移動速度については以下の比較が成り立ちます。
| 基本 | 前進 | ・・・ → (6) → (1) → (2) → (3) → (4)=[6] → [1] → [2] → [3] → [4]=<6> → <1> → <2> → <3> → <4> → ・・・ |
| 後退 | ・・・ → <4> → <3> → <2> → <1> → <6>=[4] → [3] → [2] → [1] → [6]=(4) → (3) → (2) → (1) → (6) → ・・・ | |
| 2倍速 | 前進 | ・・・ → (6) → (5) → (4)=[6] → [5] → [4]=<6> → <5> → <4> → ・・・ |
| 後退 | ・・・ → <4> → <5> → <6>=[4] → [5] → [6]=(4) → (5) → (6) → ・・・ | |
| 3倍速 | 前進 | ・・・ → (3) →→ [5] →→ <1> → ・・・ |
| 後退 | ・・・ → <1> →→ [5] →→ (3) → ・・・ |
---
| 胴の向き=右 | 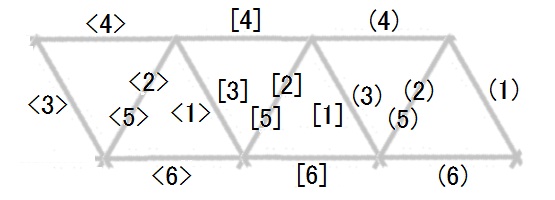 |
| 胴の向き=左 | 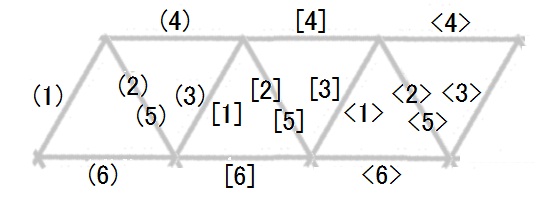 |
| ホバー順回転+続行横切替 | ・・・ → (1) → (2) → (3)=[1] → [2] → [3]=<1> → <2> → <3>
→ ・・・ =ピボット歩き |
胴の向き=右 | 左進 |
| 胴の向き=左 | 右進 | ||
| ・・・ → <3> → <4> → <5> → <6> → <1>=[3] → [4] → [5] → [6] → [1]=(3) → (4) → (5) → (6) → (1) → ・・・ | 胴の向き=右 | 右進 | |
| 胴の向き=左 | 左進 | ||
| ホバー逆回転+続行横切替 | ・・・ → (1) → (6) → (5) → (4) → (3)=[1] → [6] → [5] → [4] → [3]=<1> → <6> → <5> → <4> → <3> → ・・・ | 胴の向き=右 | 左進 |
| 胴の向き=左 | 右進 | ||
| ・・・ → <3> → <2> → <1>=[3] → [2] → [1]=(3) → (2) → (1)
→ ・・・ =ピボット歩き |
胴の向き=右 | 右進 | |
| 胴の向き=左 | 左進 | ||
| 順逆混合(反転横切替・無スキップ) | ・・・ → (1) → (6) → (5) → (4) → (3)=[1] → [2] → [3]=<1> → <6> → <5> → <4> → <3> → ・・・ | 胴の向き=右 | 左進 |
| 胴の向き=左 | 右進 | ||
| ・・・ → <3> → <4> → <5> → <6> → <1>=[3] → [2] → [1]=(3) → (4) → (5) → (6) → (1) → ・・・ | 胴の向き=右 | 右進 | |
| 胴の向き=左 | 左進 | ||
| 順逆混合(反転横切替・有スキップ) | ・・・ → (1) → (6) → (5) → (4) →→ [2] →→ <6> → <5> → <4> → <3> → ・・・ | 胴の向き=右 | 左進 |
| 胴の向き=左 | 右進 | ||
| ・・・ → <3> → <4> → <5> → <6> →→ [2] →→ (4) → (5) → (6) → (1) → ・・・ | 胴の向き=右 | 右進 | |
| 胴の向き=左 | 左進 |
移動速度については以下の比較が成り立ちます。
| 基本 | ・・・ → <3> → <4> → <5> → <6> → <1>=[3] → [4] → [5] → [6] → [1]=(3) → (4) → (5) → (6) → (1) → ・・・ |
| ・・・ → (1) → (6) → (5) → (4) → (3)=[1] → [6] → [5] → [4] → [3]=<1> → <6> → <5> → <4> → <3> → ・・・ | |
| 2倍速 | ・・・ → <3> → <2> → <1>=[3] → [2] → [1]=(3) → (2) → (1) → ・・・ |
| ・・・ → (1) → (2) → (3)=[1] → [2] → [3]=<1> → <2> → <3> → ・・・ | |
| 3倍速 | ・・・ → <6> →→ [2] →→ (4) → ・・・ |
| ・・・ → (4) →→ [2] →→ <6> → ・・・ |
---
| 縦切替 | 横切替 | |||
| 第1状態 | 横形 | = | 第4状態 | 基本形 |
| 第2状態 | 基本形 | = | 第5状態 | 基本形 |
| 第3状態 | 横形 | = | 第6状態 | 基本形 |
| 第4状態 | 横形 | = | 第1状態 | 基本形 |
| 第6状態 | 横形 | = | 第3状態 | 基本形 |
| 胴の向き=カニ | ||||
| 縦切替 | 横切替 | |||
| 第1状態 | 基本形 | = | 第4状態 | 横形 |
| 第2状態 | 基本形 | = | 第5状態 | 基本形 |
| 第3状態 | 基本形 | = | 第6状態 | 横形 |
| 第4状態 | 基本形 | = | 第1状態 | 横形 |
| 第6状態 | 基本形 | = | 第3状態 | 横形 |
| 直進 | 続行縦切替 | 続行横切替 | |
| 順回転 | 前進(胴の向き=右) | = | 左進(胴の向き=左) |
| 前進(胴の向き=左) | = | 右進(胴の向き=右) | |
| 後退(胴の向き=右) | = | 右進(胴の向き=左) | |
| 後退(胴の向き=左) | = | 左進(胴の向き=右) | |
| 逆回転 | 前進(胴の向き=右) | = | 左進(胴の向き=左) |
| 前進(胴の向き=左) | = | 右進(胴の向き=右) | |
| 後退(胴の向き=右) | = | 右進(胴の向き=左) | |
| 後退(胴の向き=左) | = | 左進(胴の向き=右) |
馬術用語に倣って、縦切替(胴の向き=カニ)での直進を「パッサージュ」と呼ぶ事にしました。
---
直進は、ホバー+縦切替やホバー+横切替としてだけでなく、最小振幅のジグザグ進として認識する事も出来ます。
最小振幅のジグザグ進では、胴の向き=ヒトです。
---
下書き
四つ足の構え(直進)2022年08月22日撮影分@液態用ステップ@空手の技@動画
四つ足の構えピヴォット歩き(速報)2025年09月28日撮影分@液態用ステップ@空手の技@動画