since 2003
イレコナビ サイトマップ
| 気態用 | 液態用 | 固態用 |
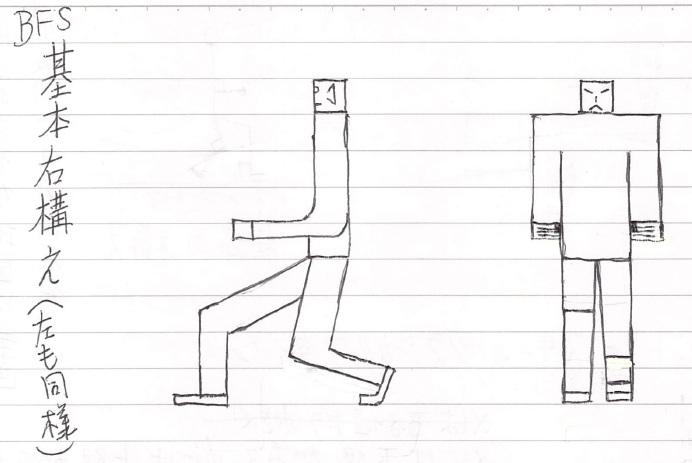
BFS基本姿勢を以前は、静止状態から急発進して敵に衝突する時の急発進の起点の姿勢だ、という風に考えていましたが、2023年末頃までには、歩行中や小走り中の姿勢がBFS基本姿勢だ、静止状態から急発進して敵に衝突するBFSの起点としては、AFS真半身姿勢が適している、と考える様に変わりました。
BFS基本姿勢は歩幅の進行方向に垂直な成分が非ゼロなので、この姿勢で重心を加速すると、どうしても地面からトルクを受けてしまい、回転を防ぐ為には前足でヘリコプターの後輪翼の様な事をしなくてはいけなく成り、これを私は不出来だと思うからです。
以下の資料は改定前の古い資料です。
03日@2015年02月@日記に、以下の見解に対する修正が、書かれています。
BFS派空手では前屈立ちが基本だ、という旧来の常識が再発見された形です。
左右方向への足の開きは、直立姿勢で左右の脚の骨が平行に成る様なカカトの横間隔を維持する。
前後方向への足の開きは、後ろ脚の膝を床面に着けた時に、後ろ脚の膝の前端が前脚のカカトの後端に接する様に決める。
前足は足裏全体で接地し、後足は前底足のみ接地とする。
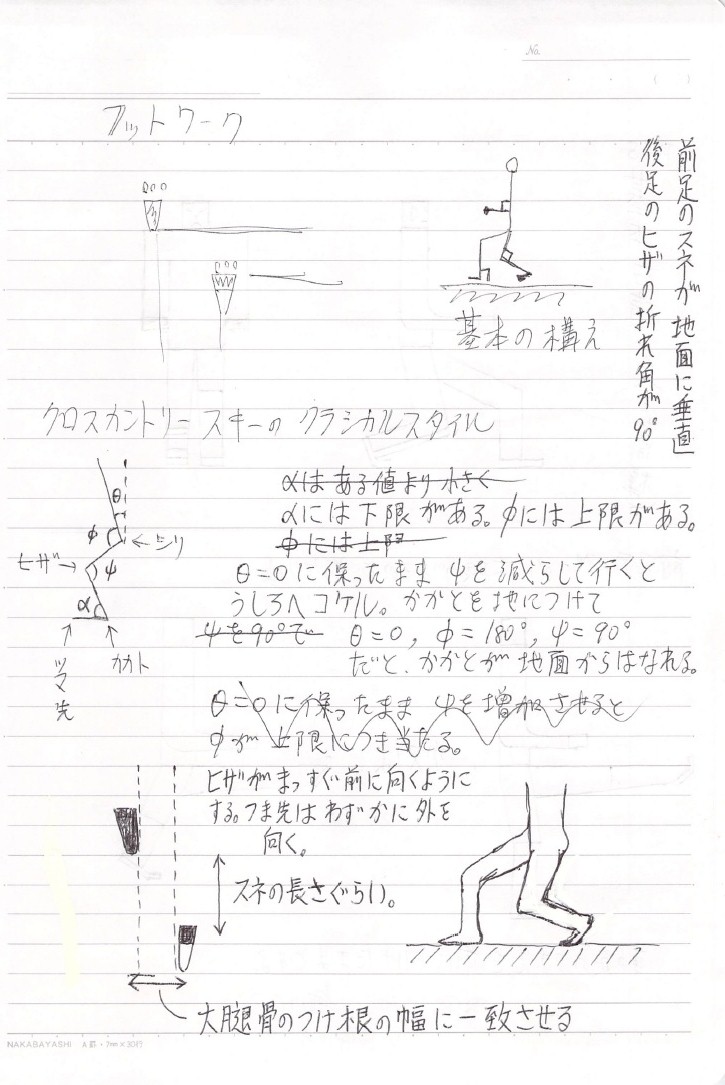
前脚のスネは鉛直(重力の方向、地面に垂直)にする。
後ろ脚の膝の折れ角は、直角を下限として適宜選択する。
背骨と首の骨は鉛直にする。
腕は、左右とも、上腕(肩から肘まで)を体側に着け、肘を直角に曲げて、肘から手首までを水平にする。
手は、左右とも、正拳に握り、手の甲の面が鉛直(縦拳の向き)、手の甲が外に、掌が内側に向く様にする。
手首の角度は、正拳を実打する瞬間の角度にする。
徒競争のスタート待ちの腕のポジションも、検討に値する。
結局、腕は左右両方とも脱力してダラリと体側に垂らす事にした。
手は左右両方とも開手で甲を外に向ける事にした。
腰および上半身の向きは、半身に成らず相手に正対する向き、とする。
胸板が、相手と自分の重心を結ぶ直線、に垂直。
左右の大腿骨の付け根を結ぶ直線は、水平で、かつ、相手と自分の重心を結ぶ直線に垂直。
左右の肩の高さは等しくする。
クロスカントリースキーのクラシカルスタイルの様な運動が自然に想起される様な足脚の向き。
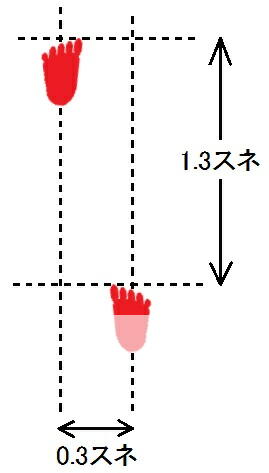
膝が真っ直ぐ前に向く様に(腰を落とすと膝が真っ直ぐ前に出る様に)する。
つま先は僅かに外を向く。
BFS基本構えでは、半身にならず腰は正面に向けるので前足も後ろ足もつま先は前方に向く。
正確には、膝を曲げたときに膝がまっすぐ前方に出るような角度につま先を向ける。
するとつま先はわずかに外に開く事になる。
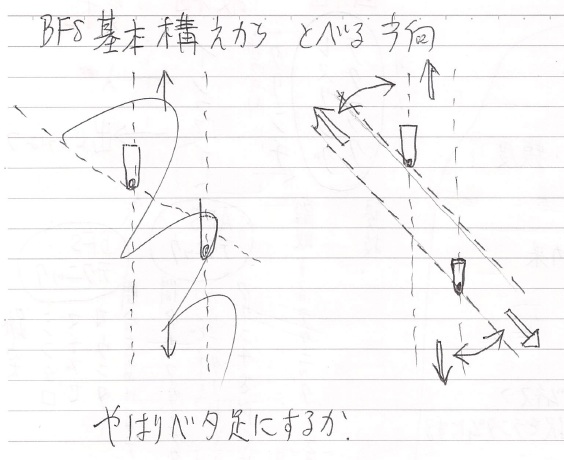
BFS基本構えは前ステップの準備姿勢であり、前に跳ぶ為のバネを溜めた状態だ。
膝だけでなく足首のバネもちゃんと溜まっていなくてはいけない。
またこの状態では重心が前に寄り過ぎない様に注意する。
バネの溜めが最大に成るのは後脚の膝の折れ角を90度にした時で、この姿勢が猫足立ちの本質だろう。
正確には猫足立ちではない。
後ろ足の爪先の向きが猫足立ちとは異なるし、後ろ足のカカトを地面から浮かせ前足のカカトを接地する点が猫足立ちとは逆だ。
後ろ足のつま先と前足のカカトの前後幅は下の図3の方法で決まる間隔に揃える。
後ろ足の膝は最小で90度まで曲げる。
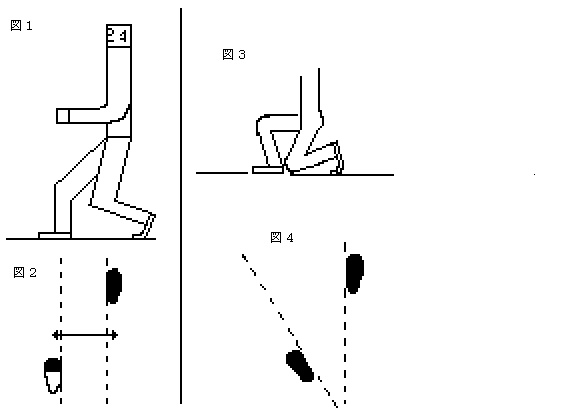
図4はBFS基本構えの足の配置ではありません。
前足と後足の爪先の前後間隔を1.3スネにすると、腰の高さを色々選択できる。
この間隔では、後脚の膝を90度まで曲げて構えれば、ハーフステップで腰が上に浮く、という問題が生じる。
この間隔でも、腰高で構えれば、ハーフステップで腰が浮く、という問題はあまり感じられない。
この間隔は図3の方法で実現できます。
1.4スネでは、腰の高さが決まってしまう感じで、腰の高さを変える事が出来ない。
1.5スネでは、構えた時に後脚のテンションが高く、楽でない。
直立姿勢で左右の脚の骨が平行に成るのは、カカトの横間隔が約0.3スネぐらいの時です。
| 実 例 |
2012年10月19日DEEP岸本泰昭vs菊野克紀 | R1の冒頭(解説付) |
---
---
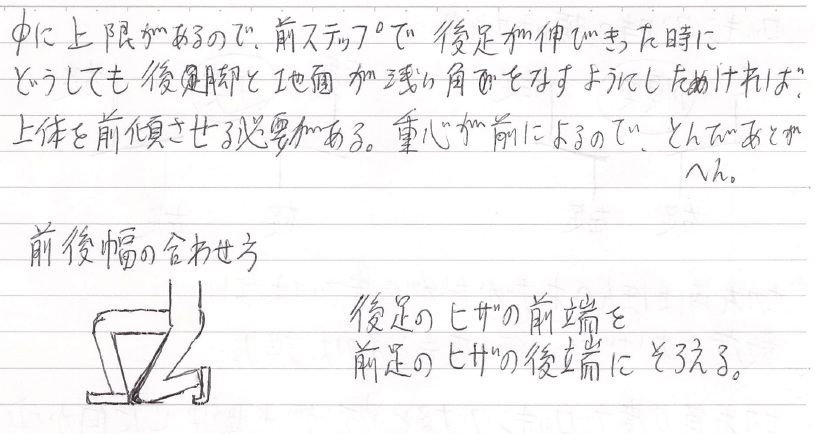
φに上限があるので、前ステップで後脚が伸び切った瞬間にどうしても後脚と地面が浅い角を為す様にしたければ、上体を前傾させる必要があるが、そうすると、重心が前に寄るので、跳んだ後が変に成ってしまうので、ダメ。

遠景を見れば分かる様に、カメラの傾きが間違ってます。
電柱と背骨は平行に成っているので、被写体(私)は正しく構えている様です。
前脚のスネが鉛直に成っていない点は正しくありません。
この立ち方は、後足の爪先を前に向けているために、バックステップで、アキレス腱に大きな負担が掛かる事と安定性が悪い事が、欠点だ。