since 2003
イレコナビ サイトマップ
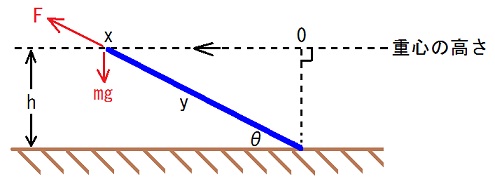
x = 接地点の真上から重心までの水平距離
y = 接地点から重心までの距離
θ = 接地点と重心を結ぶ直線が地面と為す角
θ=θ0の時(t = 0とする)に前足を地面から離し、重心の高さを一定値hに保って後脚を伸ばして加速する。
m(d/dt)2x = F cosθ, 0 = F sinθ- mg ・・・ 運動方程式
∴ (1/g)(d/dt)2x = 1/tanθ = (1/h)√(y2 - h2)
∴ (d/dt)2x = g/tanθ = (g/h)√(y2 - h2) = (g/h)x
∴ x = A exp[t√(g/h)] + B exp[-t√(g/h)]
dx/dt = [√(g/h)]{A exp[t√(g/h)] - B exp[-t√(g/h)]}
t = 0 で dx/dt = 0 だから、
A - B = 0
∴ A = B
∴ x = 2A cosh[t√(g/h)]
t = 0 の瞬間の加速度は、
d2x/dt2 = 2A(g/h)cosh[t√(g/h)] = 2Ag/h
これが g/tanθ0に一致する事から、
2Ag/h = g/tanθ0
∴A = h/(2tanθ0)
だと分かる。
故に、
x = [h/(tanθ0)]cosh[t√(g/h)]
θ=θ0の瞬間のxの値をx0とすると、
x0 = h/tanθ0
だから結局、ハーフステップにおける重心運動は、

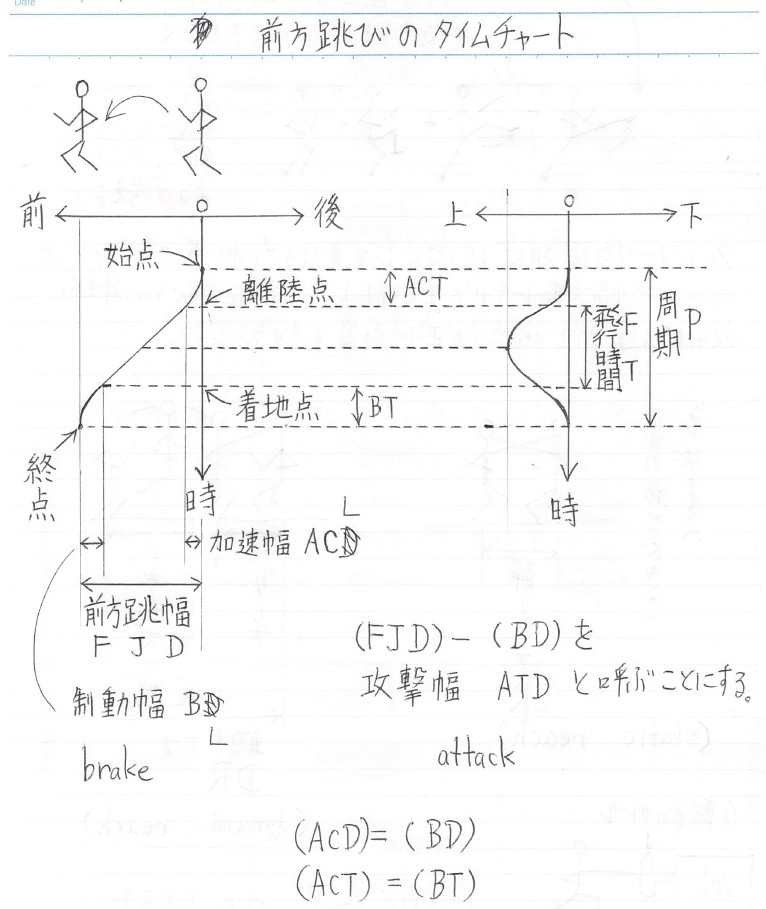
加速終了と同時に前足を着地させて減速開始するとする。
加速と減速は時間反転対称だから、LFとTFは次の関係式で結ばれる。
LF/2 = 2A{cosh[(TF/2)√(g/h)] - 1}
∴ LF = 4A{cosh[(TF/2)√(g/h)] - 1}
∴ LF = [2h/(tanθ0)]{cosh[(TF/2)√(g/h)] - 1}

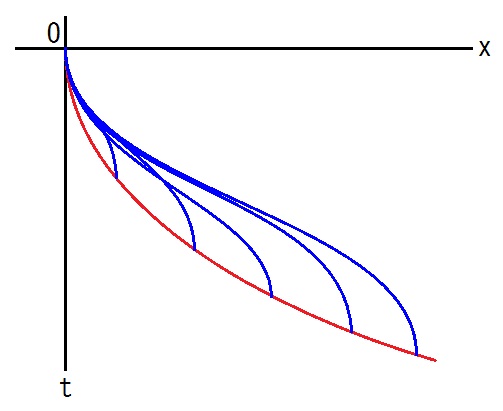
青色の曲線 = (h, θ0)を固定した場合の(LF, TF)の様々な値に対する重心の運動
赤色の曲線 = (h, θ0)を固定した場合のLFとTFの関係
| 子ページ | 後ろへハーフステップ |
| 横へハーフステップ |
---
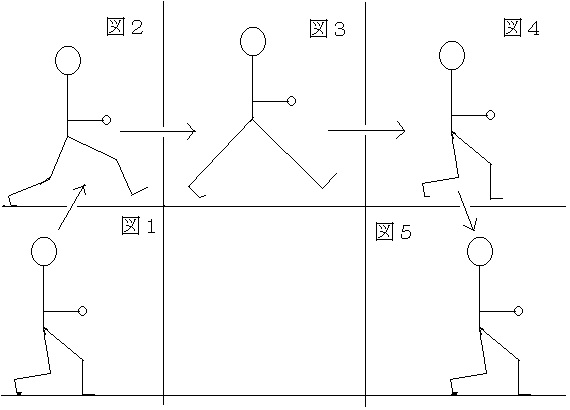
前ステップ=ハーフステップ
左足と右足の前後関係が変わらないステップ。
始状態と終状態はBFS基本構え。
これでは疲労が激しいし移動がぎこちなく成る様であれば、基本練習ではこのままとし応用戦術以降ではもう少し腰高でよい。
前ステップ終了時に重心が前に寄り過ぎていると次のステップが不十分となり前への連続ステップが上手く行かない。
跳ぶときには後ろ足が伸びきるまでシッカリと地面を蹴る。
後ろ足のつま先を外にではなくほぼ真正面に向ける事にしたので親指の先から付け根に加重が偏る事なく、前底足全体で加重を負担する。
腰の向きとつま先の向きの間には関係があるので、この関係に逆らうと足首や股関節に無理が掛かる。
後ろ足の引付を素早く行ない、後ろ足の引き付けの完了と前足の着地が同時でなくてはいけない。
後ろ足の引き付けは前へ向かってではなく股へ向かってのつもりで行なうと後ろ足が地面に引っかからず具合が良い。
出来れば後ろ足は前底足を接地させたままスライドさせる。
土の上へ着地するときには前足はカカトから着地する。
アスファルトの上ではつま先で着地して足首のばねを利用して膝へのショックをやわらげようかと思ったが、これをやると足首を痛めるので前足は足裏全体で着地する事にした。
後足の爪先を外に向ける既存の構えからの前ステップに比べて、私のBFS基本構えからの前ステップには、腰が上に浮くという欠点が有る。
この点を改善するためには、BFS基本構えを修正する事も考えられるが、BFS基本構えをそのままにしておいて、前ステップ序盤の挙動を、前足を地面から離すと同時に後足で地面を蹴るのではなく、前足を地面から離した後、少し遅らせて後足で地面を蹴る、という風に変更すれば良いのではないか、という風に思う。
この点は、まだ試していない。
後足で地面を蹴るタイミングを遅らせると、突発性が減少し、敵にとって対処し易い技に成ってしまう、という懸念は有る。
しかし、既存の猫足立ちからの前ステップの突発性も同程度なら、そういう選択肢を残しておく価値は有るだろう。
ただし、そうだとすると、これは基本ではなく成り、基本としては、やはり、BFS基本構えのスタンスを広げてやり直す必要が出て来そうだ。
実際にやって見ると、跳び幅(始状態と終状態のズレ)は、前足の爪先と後足の爪先の前後間隔が1.3スネのBFS基本構えでは最大で1.48スネ≒1.21ウデぐらいだった。
前足の爪先と後足の爪先の前後間隔が1.4スネのBFS基本構えでは最大で1.22スネ≒1ウデぐらいだった。
前者では後足が前足の元の位置を越え、後者では越えない。
07日@2015年02月@日記
腰の上下動がゼロならば、加速終了時の重心の速さは、大きさ(L/h)gの加速度で L cos(a) - L cos(b) の距離だけ加速して得られる速度、に等しい事が示されています。
Lは脚の長さの半分(直立姿勢での膝の高さ)、hは腰の高さ、aは加速開始時の膝裏の角度、bは加速終了時の膝裏の角度、gは重力加速度です。
(L/h)g は、腰を落とせば落とすほど大きく成りますが、h>L だからg より小さい。
L cos(a) - L cos(b) は、大腿骨に沿った直線への脚の射影の伸び、です。
膝を直角に曲げて後足の真上に腰が来る構えから後脚が伸び切るまで加速する場合、
a = π/2(直角), b = π(180度), h = L√2
を代入すると、加速終了時の重心の速さは、
√[2(g/√2)L] = √[gL√2]
試しに、この式に L = 0.5m を代入すると、
√[9.8m/s2×0.5m×1.4] = 2.6m/s
高岡英夫氏の著書に3m/sのBFSが存在する、と書いてあったので、そう成るLを計算してみる。
3m/s = √[gL√2]
∴9m2/s2 = gL√2
∴L = 9m2/s2 ÷(g√2) = 9m2/s2 ÷(9.8m/s2×1.4) = 0.66m
まあ、そういう人も居るかもねえ。
けど、高岡英夫氏の著書に書かれている3m/sのBFSというのはハーフステップBFSではないのかもしれないし、私の計算も途中で近似を使ってるので、そこまで照合する事は無理かも。
08日@2015年02月@日記に、体軸の周りの回転がキャンセルされるメカニズムが説明されています。
正拳BFS(BFS用ハーフステップ)@BFS@空手の技@動画