since 2003
イレコナビ サイトマップ
| 気態用 | 液態用 | 固態用 |

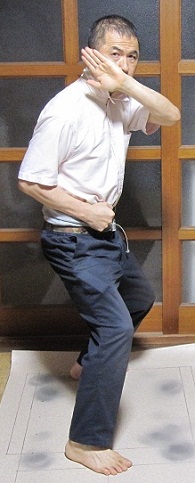
ボクシングのフリッカー・ジャブの準備姿勢に似ているが、ボクシングのフリッカー・ジャブの準備姿勢では後足側の腕を逆ストレート打ちの準備状態にするし前足側の腕の肘をあまり曲げないのに対して、私のAFS真半身姿勢では逆ストレート打ちの可能性を捨ててガードを優先させているし前足側の腕の肘を大きく曲げて脇腹ガードを作っている、という違いが有る。
後足側の腕のガード手の上縁スレスレの所から覗き見る様にして敵を見る。
前足側の腕の様子がボクシングのフリッカー・ジャブと違うのは、私のAFS真半身姿勢からの真横へのストレート打ちの力学は実質的にはBFSであるのに対して、ボクシングのフリッカー・ジャブの力学は実質的にはAFSバックハンド打ちだからです。
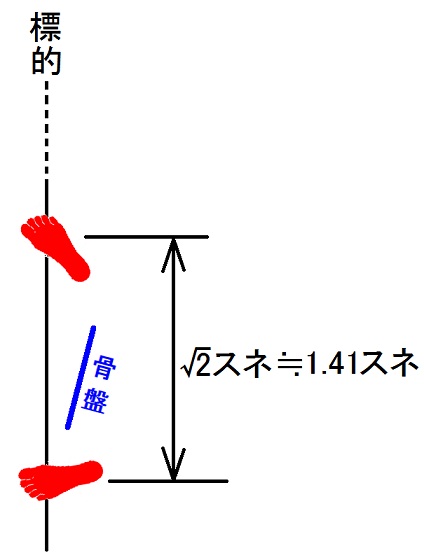
AFS真半身姿勢では、接地面の捻転中心間の距離が√2スネ≒1.4スネです。
接地面=足前底(中足)。
接地面の捻転中心というのは転向時の接地面の捻転中心であって、AFS真半身姿勢は両足裏全面接地の姿勢です。
敵の重心直下と自分の重心直下を結ぶ直線上に両足の接地面の捻転中心を置きます。
その足配置でまず騎馬立ちに成り、騎馬立ちから両足爪先と胴の向きを同時に変えて、胴の正面が出来るだけ敵の方を向く様にします。
すると、敵に近い方の足の内側のラインは敵の方角とは45度ぐらい違う方角を向きます。
両足の位置が真半身の配置に成っているせいで、そこまでしか行かないからです。
胴の正面が出来るだけ敵の方を向く様に向きを変える事は、無理なく出来る範囲(軽く動く範囲)で行ないます。
胴の正面が出来るだけ敵の方を向く様にした後、敵から遠い方の足の爪先の向きを開く方向に変えます。
すると、敵から遠い方の足の内側のラインが敵の重心直下と自分の重心直下を結ぶ直線と垂直に成った状態よりも少しだけ爪先が後ろを向いた角度に成ります。
そのまま後屈立ちを作ります。
これでAFS真半身姿勢は完成です。
実測に基づいて青色太線(骨盤位置)を2024年03月29日に記入しました。
敵に近い方の腕では脇腹ガード、敵から遠い方の腕では逆側頬ガードを形成します。
この状態から前屈立ちに移行しながら敵に近い方の腕で真横へのストレート打ちを行ないます。
胴を出来るだけ敵の方に向けるのは、真横へのストレート打ちが肩関節の可動範囲内に収まるようにするためです。
敵から遠い方の足の爪先を開く向きに変えないと、敵から遠い方の脚のヒザを大きく曲げた時に足首の関節の可動限界に当たってしまいます。
| 座標軸 |
 |
 |
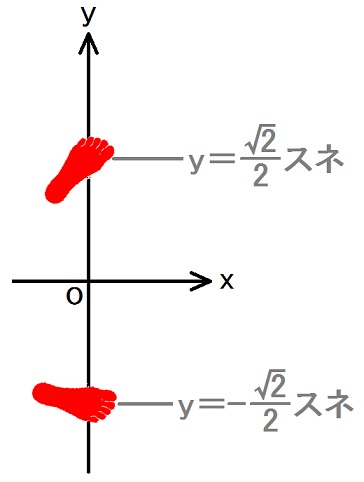
| 前足=左足の場合はx軸の正の向きは右向き、前足=右足の場合はx軸の正の向きは左向きです。 (↑後で変更するかもしれない) z座標は、床(地面)からの高さです。 原点は両足前底中心を両端とする線分の中点だとしておきましたが、後で変更するかもしれません。 |
| 重心の位置 |
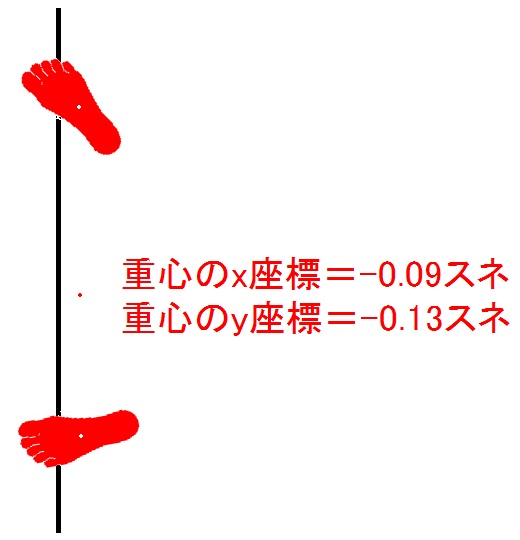 |
| 体重計に片足ずつ乗せて測定したら、前足に体重×(3/7)、後足に体重×(4/7)が掛かっている事が分かった。 足裏の力点として目分量で図中の白色点を置き、これらを結ぶ線分を4対3に内分する点を重心直下の位置だと考えて、その座標を求めた。 すると、重心のx座標は約-0.09スネ、重心のy座標は約-0.13スネである事が分かった。 図中のこの座標の位置に赤色点を記入しておいた。 --- 本項の初版公開は2024年03月31日です。 最初は測定にデジタル・ヘルスメーターを使った。 初版で公開した数値(y = -0.18スネ)は、その結果です。 しかし、その測定では、前足に掛かっている力と後足に掛かっている力の合計が体重に一致する事を確認し忘れた。 そこで、念のために後日、やはりデジタル・ヘルスメーターを使って、再測定すると、3回ほど測定したが、どの回も、前足に掛かっている力と後足に掛かっている力の合計が体重よりも3~5kg小さかった。 それらの測定結果に基づくと、 (前足に掛かっている力)÷[(前足に掛かっている力) + (後足に掛かっている力)] = 0.43~0.44, (後足に掛かっている力)÷[(前足に掛かっている力) + (後足に掛かっている力)] = 0.57~0.56, だった。 前足に掛かっている力と後足に掛かっている力の合計が体重に一致しないという事は、測定結果が間違っているか、私のAFS真半身姿勢が測定するたびに変わってしまっていたからだ、と考えられる。 膝を伸ばして棒立ちに成っている時と違って、AFS真半身姿勢では膝を屈して中腰に成っているので、ヘルスメーターに掛かる力が一定せず(空手の達人なら一定させる事が出来るのかもしれないが)、小刻みに変動しているのが、ヘルスメーターの液晶表示を見て分かった。 そういう状況では正確な測定が出来ない代物なのだろう、デジタル・ヘルスメーターという物は。 そう考えた私は、古いバネ秤(ばかり)方式のアナログ体重計で、追加の再測定を行なった。 その結果、前足裏が地面と押し合う力の大きさと後足裏が地面と押し合う力の大きさの比は、かなり正確に3対4だと分かった。 両者の合計が体重に一致する事も確認できた。 これは、言い換えると、 (前足裏が地面と押し合う力の大きさ) ≒ (体重)×0.43, (後足裏が地面と押し合う力の大きさ) ≒ (体重)×0.57, である事を意味します。 デジタル・ヘルスメーターでの測定結果に基づいたのと同じに成りました。 デジタル・ヘルスメーターがした数え落としは等差ではなく等比で出ていたからでしょう。 前足裏が地面と押し合う力の大きさと後足裏が地面と押し合う力の大きさの比が3対4という簡単な整数比になった事は、音楽で音程を感じる音感の空手版かもしれない。 |
足前底中心としては、中指の中足趾節関節を考えます。
---
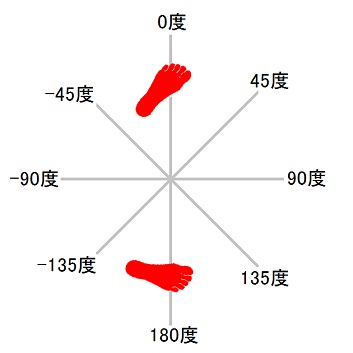
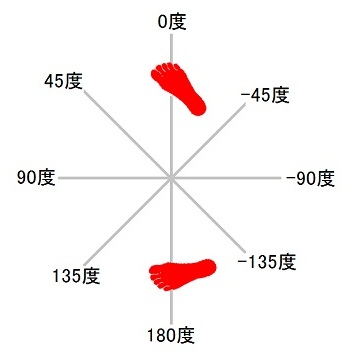
空間内の色々な点の位置の方位角を、以下の様に定義します。
| 前足=左足の場合 | 前足=右足の場合 | |
| 方 位 角 |
 |
 |
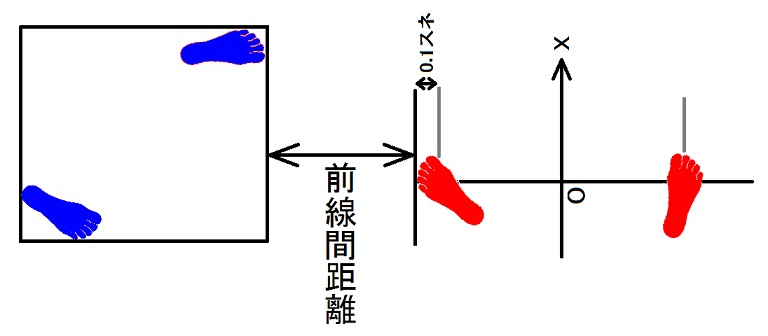
| 前線間距離 |
 |
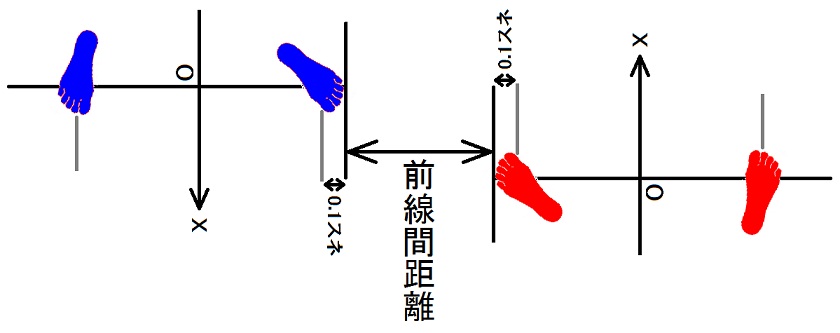 |
| AFS基本姿勢の足前底中心のx座標とy座標がどちらもAFSバッター・ボックスの縦線のx座標や横線のy座標と0.1スネだけ違う事を参考にして、AFS真半身姿勢の前線は
y = [(0.5√2) + 0.1]スネ ≒ 0.8071スネ だと定めます。 AFS基本姿勢 vs AFS真半身姿勢の場合、 [前線間距離] = [原点間距離のy軸に平行な成分] - 0.60スネ - 0.8071スネ ≒[原点間距離のy軸に平行な成分] - (1.41スネ) ∴ [前線間距離] = [自分のAFS技の標的の最適位置のy座標(自分のy軸で)] + [標的位置にある敵の部位のy座標(敵のy軸で)] - (1.41スネ). AFS真半身姿勢 vs AFS真半身姿勢の場合、 [前線間距離] = [原点間距離のy軸に平行な成分] - (0.8071スネ×2) ≒[原点間距離のy軸に平行な成分] - (1.61スネ) ∴ [前線間距離] = [自分のAFS技の標的の最適位置のy座標(自分のy軸で)] + [標的位置にある敵の部位のy座標(敵のy軸で)] - (1.61スネ). 敵の前線よりも自分の前線の方が敵に近い場合は、前線間距離 < 0 として表示する事にします。 |
敵の前足=左足の場合には私の前足=右足とし、敵の前足=右足の場合には私の前足=左足として私がAFS真半身姿勢を取れば、敵が私に肘フォアハンド水平打ちをする事が出来なく成る可能性が有る。
その可能性は、水平打ち@フォアハンド@AFS@液態用@攻撃技で調査中です。