since 2003
イレコナビ サイトマップ
ボクシングの試合でだったと思うが、有効打を当てられてその場でよろめいている選手に相手の選手が追撃しようとしているのに追撃できないで居るのを見た事が有る。
狙いが定まらなかったんだと思う。
これが、ジャッキー・チェンの映画でおなじみの酔拳、の極意なのではないか。
ランダム歩行構えのコンセプトを私は、1990年代には既に考えていたと思いますが、正三角形タイルで構成するという具体的な方法を考え出したのは2022年05月27日です。
正三角形タイルの正三角形の1辺の長さは0.9〜1.0スネです。
靴下を履いて床の上でやってみると、14ステップに約8.3秒ぐらい、重心移動が完了するまで次のステップを始めなければ14ステップに約14.0秒ぐらい、全速でやれば14ステップに約4.3秒ぐらい掛かりました。
普通に歩けば28ステップに約19秒ぐらい掛かった。
インターネットで調べると、1歩に掛かる時間は最大速度では0.6秒、最大歩幅では0.7秒だと書かれていた。
全速でやるには腰から上を不動にして脚足だけ動かす必要が有りますが、全速でなければかなり速いペースでも重心や頭を各歩に随伴させて移動させる事が出来ます。
ペースを上げれば上げるほどローキックに対する防御効果は高まりますが、頭を各歩に随伴させて動かさなければ上段への攻撃に対する防御効果が生じません。
胴の位置や向きが各歩に随伴して変わる事も、中段への攻撃に対する防御効果の点で捨て難い。
アスファルト路面の上でゴム底靴を履いて行なうと路面から大きい摩擦力を取れて良好だった。
1ステップに要する時間も上記より短く成りそうだ。
足間隔をAFS基本姿勢と同じにした方が強そうに見え、そちらの方が本当に強いのかもしれないが、そうすると、蹴りが出せない、踏み込み余裕が残らない、1歩に要する時間が長く成る、燃費が悪く(継続可能時間が短く)なる、交わすのに必要な量を超えて動いてしまう事に成る(無駄が多い)のではないか。
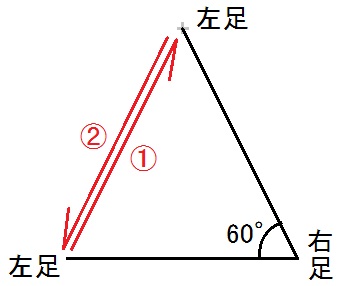
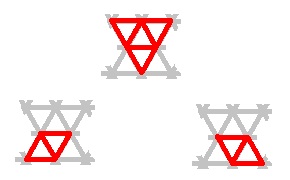
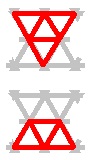
ランダム歩行構えは、両足の間隔を一定に保ったまま、下図の(1)(2)(3)(4)の運足をランダムに繰り返す歩行状態です。
(1)は、右足を中心として左足を前方に60度回転した位置まで直線的に移動する運足です。
(2)は、右足を中心として左足を後方に60度回転した位置まで直線的に移動する運足です。
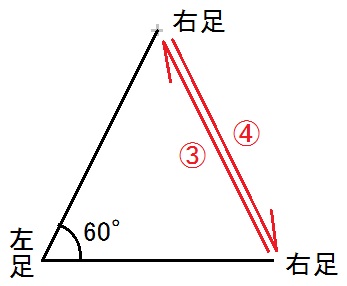
(3)は、左足を中心として右足を前方に60度回転した位置まで直線的に移動する運足です。
(4)は、左足を中心として右足を後方に60度回転した位置まで直線的に移動する運足です。
サイコロを転がして出た目を書き留める事を繰り返し、得られた数字の列から[5]と[6]を削除し、[1]は(1)に、[2]は(2)に、[3]は(3)に、[4]は(4)に対応するとすれば、ランダム歩行構えが導き出されます。
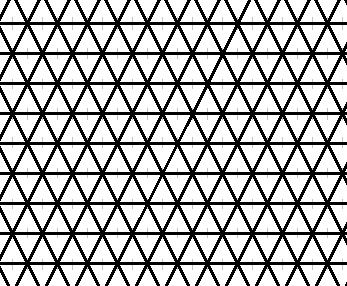
ランダム歩行構えは、下図の正三角形タイルの目に沿ったランダムな歩行状態です。
前進したり後退したり左進したり右進したり回転する事は、確率に偏りを付ければ出来ます。
確率に偏りを付ける事は、[5]の目や[6]の目を削除せず、(1)(2)(3)(4)のいずれかに割り当てれば出来ます。
前進は、[1]と[5]は(1)に、[2]は(2)に、[3]と[6]は(3)に、[4]は(4)に対応するとすれば出来そうです。
後退は、[1]は(1)に、[2]と[5]は(2)に、[3]は(3)に、[4]と[6]は(4)に対応するとすれば出来そうです。
左進は、[1]は(1)に、[2]は(2)に、[3]と[5]は(3)に、[4]と[6]は(4)に対応するとすれば出来そうです。
右進は、[1]と[5]は(1)に、[2]と[6]は(2)に、[3]は(3)に、[4]は(4)に対応するとすれば出来そうです。
しかし、途中で体の向きが変わってしまうので、これでは駄目かもしれません。
(1)だけとか(1)と(4)に[5]や[6]を対応させれば右に回転できます。
[5]や[6]を削除せず(休止)とする手も有ります。
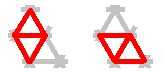
左折や右折として理解できる歩行パターンを以下のアニメーションに示しておきました。
このアニメーションには、後ろ向きに歩く部分が含まれる事に気を付けて下さい。
実用試案1(2022年06月02日発案)

実用試案2(2022年06月02日発案)

ランダム歩行構え(着想)2022年06月03日撮影分@液態用ステップ@空手の技@動画
実用試案3(2022年06月03日発案)

図で敵は上方に居る、図の上方は前方だ、と想定しています。
実用試案4(2022年06月04日発案)
実用試案5(2022年06月05日発案)UWV20220605、四つ足の構え、ホバリング

逆行させると別パターンに成るが、逆行させる代わりに全体を180度回転させても同じです。
また、右に60度回転すると、左右反転した場合と領域が同じに成る。
だから、左右反転した場合や逆行させた場合と合わせても全部で1パターンだけです。
ただし、どちらが右足でどちらが左足か(どちらが腹でどちらが背か)を反転すると別パターンに成るので、足の左右を区別すると全部で2パターンです。
UWV20220605は、以下の歩行パターンの基礎として使える。
実用試案6(2022年06月06日発案)
まず、実用試案5のタイプの2つの歩行パターンのうちの片方ばかりを任意の回数繰り返します。


その状態から任意のタイミングで突然、実用試案3の歩行パターンに切り替えます。


実用試案3の歩行パターンが終わると実用試案5の歩行パターンに戻って来ます。
ここまでを無限ループの様に繰り返します。
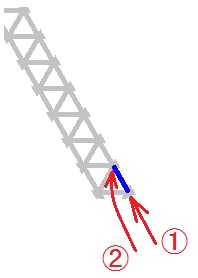
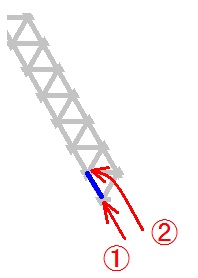
実用試案7(2022年06月07日発案)
この歩行パターンは敵を振り切って敵から離脱(気化、蒸発)する為の歩行パターンで、終盤は走行です。
赤色でスプレイされた辺りが敵の初期位置です。
実用試案8(2022年06月08日発案)
これらは、どちらも、実用試案5の歩行パターンを任意の回数だけ繰り返した後で、実用試案5と左右対称な関係に有る歩行パターンに移行し、移行後の歩行パターンを任意の回数だけ繰り返し、また実用試案5の歩行パターンに戻り、・・・という無限に続く半予定的半ランダムな歩行パターンです。
これらの歩行パターンを実用試案6の手前半分(図の下半分)に代用する。
エウレカ!(2022年06月09日発想)
実用試案5を最小パターンとして、UWV20220608aの様なランダムな遷移を繰り返せば、以下の2パターンが出来る。
これら2パターンが、最小パターン間の遷移のやり方です。
間違えた。
後者は前者と向きが違うだけだから、最小パターン間の遷移のやり方はUWV20220608だけです。
実用試案3や実用試案6も、このやり方を繰り返し用いる歩行パターンだと見なす事が出来る。
この考え方を応用すれば、実用試案4を改良できるはずだ。
この他に、実用試案7で用いた様な足を60度ではなく120度動かす運足を加味する事も、後で考えたい。
実用試案9(2022年06月13日発案)UWV20220613, 四つ足の構え、直進
進行方向を基準にすると、この運足は前足と後足がずっと入れ替わらない。
最初右足が前足で左足が後足なら、その後もずっと右足が前足で左足が後足のままだし、最初左足が前足で右足が後足なら、その後もずっと左足が前足で右足が後足のままです。
前足と後足が縦(前後方向)に並んだ状態を基準にして、そこから先に後足を動かし、次に前足を動かします。
その際の後足の行き先は1歩前の前足の位置で、前足の行き先は後足の真ん前です。
後足がリードしてレールを選択し、前足を後足のレールに引き寄せる、と考えると覚えやすい。
こうして後足と前足を1歩ずつ動かすと、また前足と後足が縦(前後方向)に並んだ状態に成ります。
私はスケートボードをやった事がありませんが、スケートボードの使い方のエッセンスには、こういうのが含まれているのではないだろうか。
進路の延長上に敵が居る様に進む選択も有り得ますが、それでは敵から見てこちらの前足と後足が入れ替わらないし、足の動きの規則性も見破られやすい。
だから、敵に向かって直進するのではなく、敵より少し左または右に向かって直進するのが実用的だと思われます。
その場合、前足と後足が縦(前後方向)に並んだ状態は、一時停止や出口の状態には向きません。
だから、覚え方は後足前足、後足前足、後足前足、・・・という区切り方ですが、動作は前足後足、前足後足、前足後足、・・・という区切り方です。
「・・・、うんこ、うんこ、うんこ、・・・」を「・・・、こうん、こうん、こうん、・・・」と読むみたいな事です。
普通の歩行から四つ足の構えの直進モードに入るには、(1)右足(2)左足の順に
という風に軌道に乗るか、あるいは、(1)左足(2)右足の順に
という風に軌道に乗る。
実用試案10(2022年06月13日発案)UWV20220613, 四つ足の構え、加圧と減圧
実用試案6を
 から
から  への遷移だと解釈し、この考え方を応用しました。
への遷移だと解釈し、この考え方を応用しました。実用試案11(発案2022年06月14日)四つ足の構え、直進、引き返し、ホバリング、路線変更、ジグザグ歩行。
引き返しは、最後に動かした足を1歩戻す事から始めれば出来る。
直進中の任意のタイミングにホバリングに切り替える事も出来ます。
 |
 |
直進モードで後足を敵に近い側のレールに乗せた直後、前足を+60°移動する代わりに-60°移動すれば、ホバリングモードに入る事が出来ます。 この-60°を選択すると同時に、5歩前からホバリングモードに入っていたのと同じ事に成ります。 ホバリングモードから直進前進モードに復帰するには、(直進で)後足(だった方の足)の前方レール上に(直進で)前足(だった方の足)を置きます。 前足が後足より後方にある状態からこれをするには前足を+120°移動する必要が有ります。 両足が縦(前後方向)に並んでる状態から、後足前足の順に動かす事を繰り返せば、直進前進できます。 ホバリングモードから直進後退モードへは、(直進で)後足(だった方の足)を(直進で)前足(だった方の足)の後方レール上に移動すれば入れます。 両足が縦(前後方向)に並んでる状態から、前足後足の順に動かす事を繰り返せば、直進後退できます。 |
 |
 |
途中で敵に背を向けるのでNG. |
直進で後足がリードしてレールを選択する、という考え方を応用すると、後足は右隣のレールを選択する事も左隣のレールを選択する事も任意に出来る。
この事を利用すると、どのレーンを直進するかを任意に切り変える事が出来る。
何回も繰り返して左隣へ左隣へという風にレーンを切り替える事も出来るし、右隣へ切り替えた後しばらく直進してから左隣または右隣へ切り替える事も出来る。
図の様に隣り合う2つのレーンだけ使って直進を最小限にとどめレーン切り替えを繰り返せばジグザグ歩行が出来る。
左折と右折
直進前進で、後足を-60°動かす代わりに-60°を超えて動かせば超過分の角度だけ直進前進の向きを変える事が出来ます。
-60°の整数倍である必要は全く有りません。
以下のアニメは後足を-120°動かした場合です。
後足を-60°動かした直後に左折を開始するには、後足をもう一度-60°動かします。
左折開始がさらに1歩後なら以下の左のアニメの様に前足を1歩戻します。
前足を戻さずに上の右のアニメの様に後足を-120°動かす手も有ります。
直進前進で、前足を+60°動かす代わりに+60°を超えて動かせば超過分の角度だけ直進前進の向きを変える事が出来ます。
+60°の整数倍である必要は全く有りません。
以下のアニメは前足を+120°動かした場合です。
ここまででは、後足を一挙に-120°動かす場合以外は全て、両足を左折後の進行方向に縦に並べています。
後足を一挙に-120°動かす場合は、それを頭の中で済ませて次の1歩を出しているのだと考えれば、どの場合も両足を左折後の進行方向に縦に並べる事によって左折しているのだ、と考える事が出来ます。
直進前進で、前足を-60°動かす代わりに+60°動かせば来た道とは別の方向への直進後退に切り替える事が出来ます。
+60°にこだわる必要は全く有りません。
以下のアニメは前足を+60°動かした場合です。