例
面
へ
の
投
影
図
の
立
ち
位
置
の
攻
撃
技
の
届
き
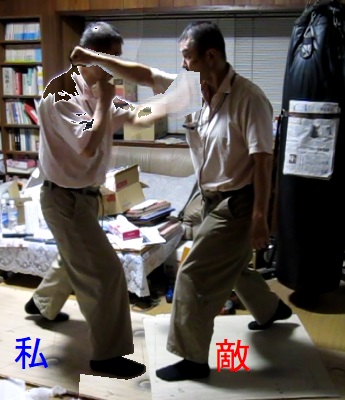
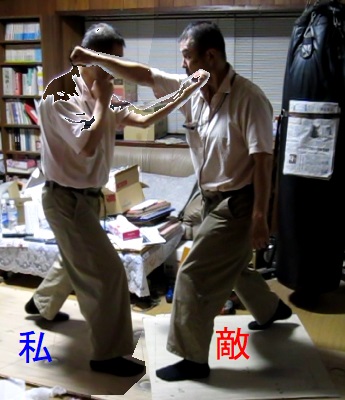
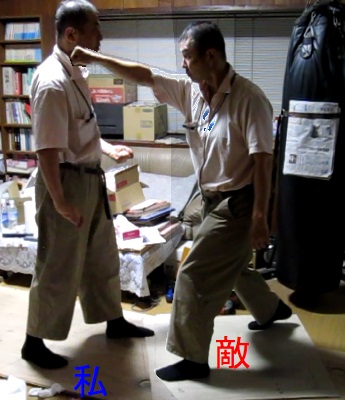
敵の右拳が私の顔に接触するか否かは、よく分からない。
接触してもクリーンヒットには成らないが、私は右手で自分の顔の右半分をガードしておく方が良い事が、この写真から分かる。
同側片目ガードが適しているだろう。
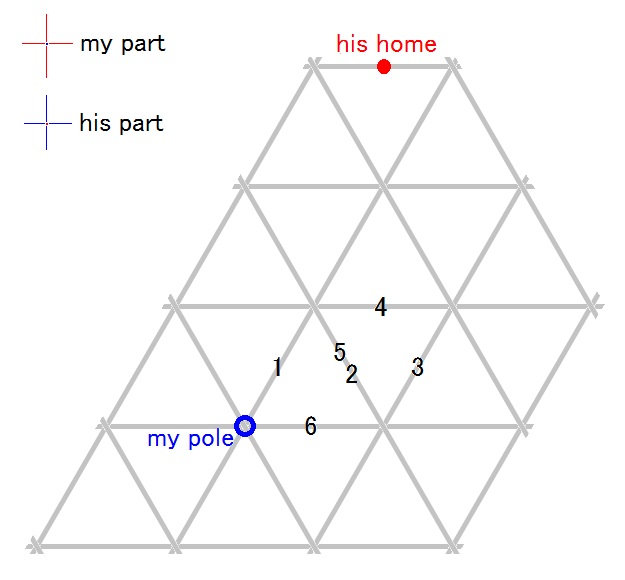
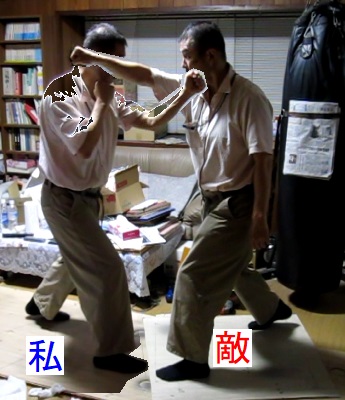
この写真では敵の右拳は私の顔に届いているが、この写真は敵の攻撃のインパクト予定タイミングより後の瞬間をとらえた物であり、敵の攻撃のインパクト予定タイミングの瞬間には私は第6状態に居るので届かない計算に成っている。
したがって、もし敵の右拳が私の顔に接触したとしても、それは、敵の伸び切った腕に私が自分から顔をぶつけに行く様な接触に過ぎず、軽い接触に成るはずです。