since 2003
イレコナビ サイトマップ
| 構え | ||
| 気態用 | 液態用 | 固態用 |
| 四つ足の構え | ||
| 基本動作 | 装飾動作 | 少年部 |
迎撃や返撃で、半分を構成する四つ足の構えは高級大理石で出来ているのに、もう半分を構成するAFSや蹴りは粗末な材木で出来ているようなものだ。
アインシュタインが発した有名な言葉をヒントに、上の言葉を思い付きました。
インターネットで調べると、木岬さんぽさんのsampofruits.la.coocan.jp/origin/result1-11.htmに、次の様に書かれていた。
| アインシュタインの厳しい目で見れば、重力場方程式の左辺は時空の幾何学によって表現されており堅固な物と言ってよかったが、右辺の方はそうとは言えなかった。 彼は、この方程式の事を、お粗末に設計された建物になぞらえて、半分は高級大理石で出来ているのにもう半分は粗末な材木で出来ているようなものだ、とけなした事まであった。 |
また、逆回転ホバーから出るH4d1とH3d1の定量的な比較によって、H4d1よりもH3d1の方が敵と私の位置関係が少しだけ改善されている事を発見した事は、水星の近日点移動についての一般相対性理論の予言が的中した事に喩えられよう。
標的(敵の被撃部位)は可動だと考えるが、標的の元の位置から点Pまでの水平距離(標的から床に下ろした垂線の足とPから床に下ろした垂線の足の距離)を何らかの大きな定数Dから差し引いて得られる距離d、で点Pの位置(技のリーチ)を表す事にする。
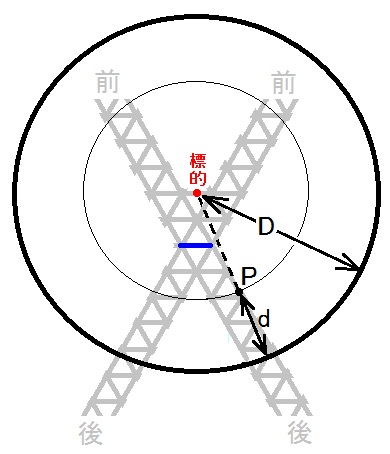
青色の線分を第4状態とする四つ足の構えホバーから出る場合を考える。
 |
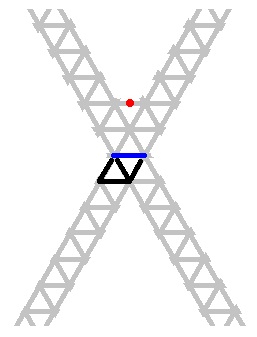 |
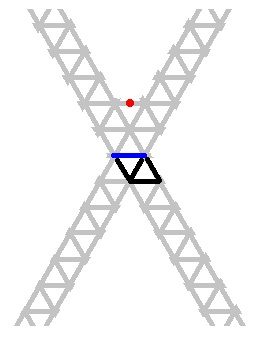
| 胴の向き=右 | 胴の向き=左 |
(リーチの不足分) = D - d.
基本的なアイデアは、ホバーから出る動きがホバー続行の動きと似ていて紛らわしいので、そこで敵が間違ったり遅れたりする事を期待できる事です。
これは、野球の投球で変化球はバッターに近付くまで直球と区別が付かない方がバッターが打てないのと同様です。
敵は、私が地面から右足を離すのか左足を離すのか、地面から離した足を前に出すのか後ろに引くのかを見て、その後の私の動きを予想します。
だから、四つ足の構えを続行する場合と四つ足の構えから出る場合で、地面から離す足も同じだし、地面から離した足を動かす向きも同じなら、敵はその後の私の動きを予想するのが困難に成ります。
敵の攻撃を空振りさせるとか詰まらせるというのは、四つ足の構えの動きによって図らずもそう成る、四つ足の構えの動きに敵が着いて行けなかったためにそうなる、というぐらいに解されるべきであって、敵のパンチやキックに反応して自分が動きを変える、というのではありません。
例えば順回転ホバーから出るF5a2の「第4状態から第5状態基本形へ移行する動きで敵の攻撃を空振りさせる」という選択の最終決断締切が第5状態完成直前、つまり空振りさせるのと同じ時期に決断されるのは、そのためです。
敵が空振りするように自分が動きを変えるのなら、そうしようという決断はもっと早く行なう必要が有ります。
だから本当は、「第4状態から第5状態基本形へ移行する動きで敵の攻撃を空振りさせ」ではなく「第4状態から第5状態基本形へ移行する動きで敵の攻撃が空振りするのに乗じて」と考える方が正確です。
四つ足の構えから出てAFS用姿勢に移行する様子は、椅子取りゲームに喩えるべきではないかと思う。
リーチが中ぐらいのAFSに適した距離にAFS用姿勢を作ると、敵の回避運動によってそのAFSが出来なく成っても、即座にリーチがもっと長いAFSかリーチがもっと短いAFSに切り替えれば自分の攻撃が敵に届きます。
この考え方は、戦艦の斉射砲撃についての夾叉(きょうさ)という戦術概念からヒントを得ました。
戦艦の砲撃の夾叉の場合は、実弾着が敵艦の現在位置を挟む(=将来位置を網羅する)のに対して、四つ足の構えから出てAFS基本姿勢に移行する場合は、可能リーチが敵の現在距離を挟む(=将来距離を網羅する)+敵の現在距離にも対応している、という風に成っています。
戦艦との違いは、戦艦は急停止できないが人は回避運動しない事も出来る、という点です。
分かり易く言うと、踏み込みでは独立式縦正拳ストレート打ちを当てるつもりで踏み込み、実際には連動式正拳前ストレート打ちや連動式肘刀前ストレート打ちに即席で切り替える、という事です。
AFSの宿命である機動性の無さのせいでアキレスと亀に成るのを、これで防げるのではないか。
四つ足の構えよりもAFS基本姿勢の方が腰の高さが若干低い。
四つ足の構えでは両手を腰の高さに配置しておき、四つ足の構えから出てAFS基本姿勢に移行する時に両手を肩の高さまで上げる事によってダウンフォースを得て、AFS基本姿勢の完成を早めます。
| 力学的に正確な言い方は以下です。 重心の下降加速度は足裏が地面から受ける抗力と全体重で決まる。 膝を急屈すれば足裏が地面から浮ける抗力をゼロまでなら減らす事が出来るが、それでも重心の下降加速度は最大で重力加速度9.8m/s^2までしか上がらない。 腕を上昇させれば腰と重心の高さの差が変化し、つまり重心に相対的な腰の下降加速度が生じ、重力加速度にこれを加算した物が腰(や肩や頭)の下降加速度に成る。 普通は、腕を上昇させれば重心は上に移動する、という風に認識されている事だろう。 しかし、これは、重心が身体のどの位置にあるかを言ったものであり、いつでも重心は地面に対して上に移動する、という意味ではない。 腰、肩、頭の高さを一定に保ったままなら腕を上昇させれば重心も上昇するけれど、足が宙に浮いた状態では腕を上昇させてもさせなくても重心は重力加速度9.8m/s^2で下降する。 今考えている問題は、重心の下降加速度が9.8m/s^2に固定されている場合であり、これが増えたり減ったりするのではないから、重心が身体の上の方に移動するという事は、身体(の腕以外の部分)が9.8m/s^2より大きな加速度で下降する、という事を意味します。 ただし、前や後ろに踏み込む実際の場合では、足裏が地面から受ける抗力をゼロに出来ないので、重心の下降加速度はもっと小さく成ります。 |
フォアハンド打ちの始状態に移行するH2cでは片手のみ肩の高さまで上昇させ反対の手は腰の高さに保ちます。
バックハンド打ちの始状態に移行するH2dでは、以前は両手を腰の高さに保ちましたが、2025年末までには、標的に当てない方の腕を逆側頬ガード形に配置する方式に変更しました。
真横へのストレート打ちの始状態への移行では、ガード腕のみ肩の高さまで上昇させる(AFSの場合)か、移行動作とストレート打ち動作を合成して両腕を肩の高さまで上昇させ(BFSの場合)ます。
例えばホバー順回転の第4状態から出てAFSする場合、第3状態から第4状態への移行で床から離す足に第4状態であまり体重を乗せなければ(第4状態を不完全化すれば)、AFS開始を早める事が出来ます。
ただし、その場合、第4状態で引き返さない事(=第5状態に行かない事)を敵が早期に察知してしまう危険が有ります。
蹴りの場合は逆です。
例えばホバー順回転の第4状態から出て蹴る場合、第3状態から第4状態への移行で地面から離す足に第4状態でしっかり体重が乗るまでは蹴りを開始できません。
第3状態から第4状態への移行で床から離す足に第4状態で最初から全体重を乗せる形に第4状態を不完全化すれば蹴りの開始を早める事が出来ますが、その場合、第4状態から蹴る事(=第5状態に行かない事)を敵が早期に察知してしまう危険が有ります。
四つ足の構えの各状態の基本は両足均等加重です。
最初は第1状態や第5状態から第6状態に移行する代わりに1つ後ろの区画の第5状態や第3状態に移行してそこから蹴る、という出方も採用しようと思いましたが、結局それはやめて、蹴りの起点としてはホバー中や直進中の状態だけを採用しました。
第1状態や第5状態から1つ後ろの区画の第5状態や第3状態に移行した直後というのは体勢に余裕が無く、蹴るには向かないと判断しました。
最初わたしはこういう風に書きましたが、移行して直ぐに蹴らばければ良い訳だから、第1状態や第5状態から1つ後ろの区画の第5状態や第3状態に移行した直後に(体勢が戻るまで待って)蹴るという選択も有りです。
その場合は、縦切替+出方を駆使したのだと考えて、出方の中にはそういう蹴り方は入れない、という単なる分類上の問題であって、実際の行動としてそういう蹴り方はしないという事ではない、と考える事にしました。
四つ足の構えから出て攻撃する練習をしてみて、ステップの加減が難しいと感じた。
例えば、蹴るという形で四つ足の構えから出る場合、出る直前に蹴りの軸足に成る方の足にどれだけの体重を乗せるかの加減が難しい。
ひとつ前の状態から出口とする状態に移行する時の重心の速度ベクトルの向きが、出ない場合と違ってしまったり、という事も有りがちだった。
テンポやリズムの様なタイミングや速さの加減も、やってみると乱れやすかった。
出る決断は、出口とする状態が完成する前に行なうのだから、その決断内容を忘れてはいけないけれど、動きとしては、出口とする状態が完成するまでは出ずにホバーなどを続行するつもりで動き、出口とする状態が完成した瞬間に急に気が変わって出る事にしたかの様に動く、というやり方を試してみると、乱れなくなった気がする。
数値は大体合ってると思うけど、今後の研究でもっと正確な数値が得られ次第、最新の値に書き換えて行くつもりです。
T1は第1状態への移行が完了する時刻、・・・、T6は第6状態への移行が完了する時刻です。
打蹴技起動可能始までの時間は、デジカメの30fps動画撮影結果のコマを数える事によって測定しました。
30fpsだと1コマ0.0333・・・秒ですが、多数回撮影して平均を取る事によって平均値としては精度0.01秒を目指しました。
インパクト可能始は、起動から接触開始までの時間だけ打蹴技起動可能始より後です。
各AFS技の到達時間(起動からインパクトまでの時間)が、両足を地面に着けたままの場合と踏み込んだ直後でどう違うかや、前に踏み込んだ直後と後ろに踏み込んだ直後でどう違うかは、未研究です。
「選択」という言葉は最終決断を表すものとします。
選択肢番号の読み方は以下です。
HNa = 第N状態から出て独立式縦拳短前ストレート打ち。
HNb = 第N状態から出て独立式縦拳長前ストレート打ち。
HNc = 第N状態から出て連動式短前ストレート打ち。
HNd = 第N状態から出て連動式長前ストレート打ち。
HNe = 第N状態から出て連動式横ストレート打ち。
FNa = 第N状態から出て短蹴り。
FNb = 第N状態から出て長蹴り。
H = 手打ちと肘打ちと腕打ち。Handの頭文字。
F=足蹴りと膝蹴りと脚蹴り。Footの頭文字。
N = 1, 2, 3, 4, 5, 6 ・・・ 第N状態から出て攻撃する。
a = 独立式縦拳短前ストレート打ち。短蹴り。
b = 独立式縦拳長前ストレート打ち。長蹴り。
c = 連動式短前ストレート打ち。
d = 連動式長前ストレート打ち。
e = 連動式横ストレート打ち。
「敵に遠い」という言い方は日本語としては多分間違いですが、「敵に近い」という言い方に揃えました。
「敵から遠い」とか「敵まで遠い」という言い方が日本語としては正しい。
例えば、逆回転ホバーから出るF2b1の説明に「第2状態後形から敵に遠い方の足のカカト底を当てる」という表現が見られますが、これを「第2状態後形から敵から遠い方の足のカカト底を当てる」とか「第2状態後形から敵まで遠い方の足のカカト底を当てる」と書くと、「から」が重複したり、「から」と「まで」が呼応に見えたりするので、読み難い。
「前足」「後足」という言葉は、四つ足の構え直進の「前足」「後足」と一致する場合にのみ用いました。
打技起動可能始までの時間の、2023年07月21日時点での測定結果は、以下です。
| 前に踏み込んで | 後ろに踏み込んで | |||
| AFS基本姿勢に | AFS真半身姿勢に | AFS基本姿勢に | AFS真半身姿勢に | |
| 第6状態から後足を | 0.58秒 | 0.73秒 | 0.53秒 | 0.95秒 |
| 第4状態から | 0.51秒 | 0.74秒 | 0.59秒 | 0.98秒 |
| 第6状態から前足を | 0.48秒 | 0.66秒 | 0.64秒 | 0.96秒 |
| --- | --- | --- | --- | --- |
| 第3状態から後足を = 第5状態から敵に遠い方の足を |
0.72秒 | 0.81秒 | 0.42秒 | 0.73秒 |
| 第1状態から後足を | - | - | 0.59秒 | 0.60秒 |
| --- | --- | --- | --- | --- |
| 第5状態から敵に近い方の足を = 第3状態から前足を |
0.43秒 | 0.56秒 | 0.70秒 | 1.02秒 |
| 第1状態から前足を | 0.47秒 | 0.47秒 | 0.81秒 | 1.06秒 |
| --- | --- | --- | --- | --- |
| 第2状態から前足を | - | - | フォア0.75秒 | - |
| バック0.77秒 | ||||
| 第2状態から後足を | フォア0.78秒 | - | - | - |
| バック0.82秒 | ||||
第2状態から前足を後ろに踏み込むとは、第3状態の方へ踏み込む事を言います。
第2状態から後足を前に踏み込むとは、第1状態の方へ踏み込む事を言います。
第3状態から後足を後ろに踏み込むとは、後足を踏み替える事を言います。
第3状態から前足を前に踏み込むとは、前足を踏み替える事を言います。
第1状態から後足を後ろに踏み込むとは、後足を踏み替える事を言います。
第1状態から前足を前に踏み込むとは、前足を踏み替える事を言います。
前足をFで表し、後足をRで表し、前に踏み込む事を↑で表し、後ろに踏み込む事を↓で表し、AFS基本姿勢を基で表し、AFS真半身姿勢を半で表し、例えば第6状態から後足を前に踏み込んでAFS基本姿勢に移行するのに掛かる時間を6R↑基と書く事にする。
すると、以下の様な大小関係が見られる。
3R↑基 > 6R↑基 > 4↑基 > 6F↑基 ≒ 1F↑基 > 3F↑基。
3R↑半 > 4↑半 ≒ 6R↑半 > 6F↑半 > 3F↑半 > 1F↑半。
3R↓基 < 6R↓基 < 4↓基 = 1R↓基 < 6F↓基 < 5N↓基 < 1F↓基。
1R↓半 < 3R↓半 < 6R↓半 < 4↓半 ≒ 6F↓半 < 5N↓半 < 1F↓半。
6R↑ < 6F↓、 6F↑ < 6R↓、 4↑ < 4↓.
5Nは、第5状態から敵に近い方の足を動かす、という意味です。
移動が大きいほど移動に掛かる時間は長いはずだ、という目で見ると、大体もっともらしいが、以下の疑問が生じる。
6R↑半 < 4↑半 という測定結果は間違ってるのではないか。
4↓半 > 6F↓半 という測定結果は間違ってるのではないか。
3R↑基 > 5N↓基 という測定結果は間違ってるのではないか。
本当は基も半も 3R↑ < 5N↓ ではないだろうか。
3F↑基 > 3R↓基 という測定結果は間違ってるのではないか。
本当は基も半も 3F↑ < 3R↓ ではないだろうか。
1F↑基 = 1F↑半
という測定結果は間違ってるのではないか。
本当は例外なく 基 < 半 ではないだろうか。
全般的に、デジカメでの撮影結果をコマ送りで調べた時に、移動開始がどのコマで、移動完了がどのコマかを識別するのが困難だった。
全体として1コマ(0.033秒)余計に数えてしまっているなどの間違いが含まれている可能性も有る。
また、日を改めて測定し直す度に違う結果が出る事が多かった、つまり測定結果のバラ付きがひどかったので、正しく動けてない回の試行の分までカウントしてしまっている、という間違いも含まれているだろう。
けれど、大体の目安は得られたと思われる。
測定では、各移動を30回ずつぐらい試行したが、30回のうちの序盤、特に最初の1回は平均値よりも移動に掛かる時間が長かった。
繰り返すうちに慣れて要領が良く成り、時間が短く成って行くからだろう。
例えば4↑基の測定結果の生データ(コマ数)は、
19,15,15,16,16,17,15,15,16,13,15,13,15,15,15,15,15,15,15,16,14,13,13,16,17,14,16,16,16,16
ですが、1回目の試行の測定結果19は平均値15.44よりも3コマ(約0.1秒)だけ多い。
平均値の計算においては、19と13をベストでない身体運動に対するものと見なして除外しました。
実戦では、最初の1回が出て来るので、上の表に書かれている平均値よりも長い時間が掛かると思わなければいけないだろう。
インパクト可能始までの時間は、打蹴技起動可能始までの時間に打蹴技の到達時間(起動からインパクトまでの時間)を足せば得られる、と考えます。
蹴りは崩れた状態の敵にだけ使い、ファースト・コンタクトでは蹴りは使わない、のを原則だと私は考えます。
これは、蹴り技というのは成功すれば自分が優勢に成るけど失敗すれば圧倒的な劣勢に成る、と私は思うからです。
蹴り技を失敗しても負けなかった具体的な事例というのは、敵がチャンスを逃しているんだと私は思う。
何も反則技に指定されておらず敵が出来る事を抜かり無く全部やってレフェリーによるブレイクも無ければ、蹴って失敗した方が負けると思う。
ムエタイの試合を見ても、ミドルキックをキャッチされて軸足を刈られる、というケースが非常に多いが、この後間も無くレフェリーによるブレイクが掛かる。
このブレイクが無ければ、上から踏めば済む話でしょうが。
また総合格闘技の試合を見て、ローキック1発でも、その蹴りでKO出来なければ、敵が何が何でもローキックされた時に組み付くんだと決めていれば必ず組み付かれてしまう、と思った。
掛け逃げ、振り逃げの様な蹴りはまだ良いが、当たったけど効かなかったというパターンが最も悪いと私は見ています。
だから、蹴るという形で四つ足の構えから出る事は、出来るだけやらないとか、蹴り技の弱点をカバーする特別な工夫を入れてある実用弾の中でしか行わない、みたいな扱いにしたい。
以下は、蹴るという形で四つ足の構えから出る事をしたくない程度の不等式です。
先撃 > 迎撃 > 返撃。
本当に効かす目的で四つ足の構えからいきなり蹴るんだったら、そこにそんな蹴りが有るとは気付かなかったとか、すっかり忘れていた、という風な不注意を敵の中に作るべきだろう。
温存という言葉が良いのかもしれない。
手技ばかり見せて蹴りを見せないとか、本命の蹴り以外の蹴りしか見せないとか。
2026年01月までのところ、四つ足の構えから出てAFS姿勢に移行する、という方法を採用しているが、四つ足の構えの足間隔を1スネよりも大きい足間隔に変更し、四つ足の構えから出ずにAFSを実行する、という方法も考えられるので、そっちの方が良いだろうか、いけないとしたらどこがいけないのかを、2026年春頃は考えていたが、その後、逆回転から出るH3d1の定量的な分析結果などを見て、四つ足の構えから出てAFS姿勢に移行する、という方法で構わない、と思うようになった。
下書き
四つ足の構えから蹴り四つ足の構えに戻る(狭マット内に収まる物)2023年12月26日撮影分@液態用ステップ@空手の技@動画
四つ足の構えから蹴り四つ足の構えに戻る(屋外撮影)2024年01月01日撮影分@液態用ステップ@空手の技@動画
四つ足の構えから後回蹴りし四つ足の構えに戻る(2024年01月02日撮影分)@液態用ステップ@空手の技@動画
| 出方 | 順回転ホバーから |
| 逆回転ホバーから | |
| 直進から | |
| ポジショニング・アナライザー |