since 2003
イレコナビ サイトマップ
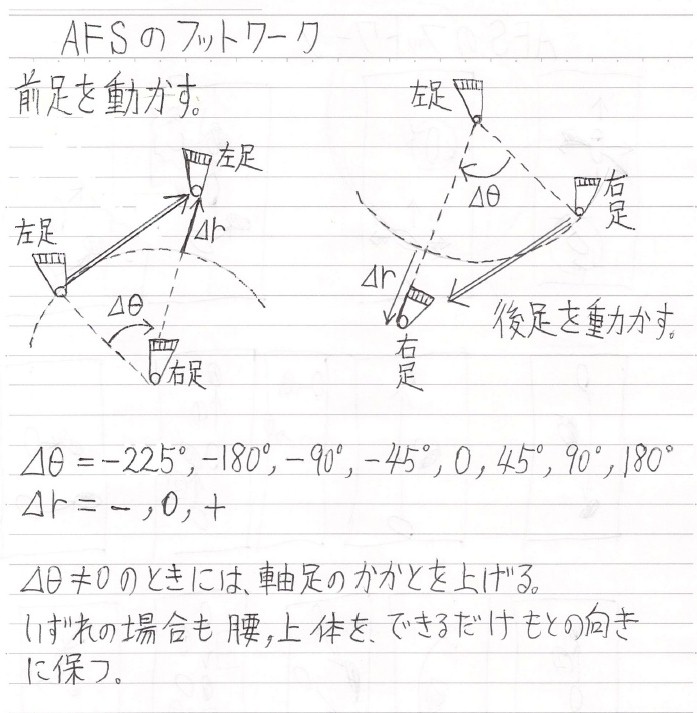
AFS基本構えから、後足または前足を軸にしたピボットを行なう。
もっと複雑な運足は、これらピボットを連続させる事によって再現する。
表記法として私は、次の方法を考案した。
ト音譜表:後足を軸にして前足を移動させる。
ヘ音譜表:前足を軸にして後足を移動させる。
正(プラス)の角度:足を前に出す。
負(マイナス)の角度:足を後ろに退く。
付点全音符:両足の間隔をAFS基本構えの場合の1.5倍にする。
全音符:両足の間隔をAFS基本構えにおける間隔にする。
2分音符:両足の間隔をAFS基本構えの場合の0.5倍にする。
♯:移動させた足とは反対の足を前足とする構えに成る。(プラスの角度の方に上体を向ける)
♭:移動させた足を前足とする構えに成る。(マイナスの角度の方に上体を向ける)
♯も♭も無し:慣性に従う。
足は、始点から終点まで直線的に移動する。
円周上を動かすのではない。
移動させる角度が大きい場合、直線的な移動は主観的には、移動させる足を直線的にではなく軸足の近傍経由で曲線的に動かすかのように認識され、これはAFS空手の基本動作に見られる運足法の正体だろう。
私は長い間、AFS空手のこの運足法を理解できず不可解だと思っていた。
※画像をクリックすると、拡大表示されます。
| 凡例 | 図解 | 説明 |
| ト音譜表 全音符 -45° |
歩幅が基本に一致する様に前足を45度後退させ、上体の向きを騎馬立ちの様にする。 | |
| ト音譜表 全音符 ♭-45° |
歩幅が基本に一致する様に前足を45度後退させ、その足を前足とした構えに成る。 | |
| ト音譜表 全音符 ♯-45° |
歩幅が基本に一致する様に前足を45度後退させ、軸足を前足とした構えに成る。 | |
| ト音譜表 付点全音符 ♭+45° |
歩幅が基本の1.5倍に成る様に前足を45度前進させ、その足を前足とした構えに成る。 | |
| ヘ音譜表 2分音符 ♯-90° |
歩幅が基本の半分に成る様に後足を90度後退させ、軸足を前足とした構えに成る。 |
| 実用例 | 詳細 | |
| ステップイン | 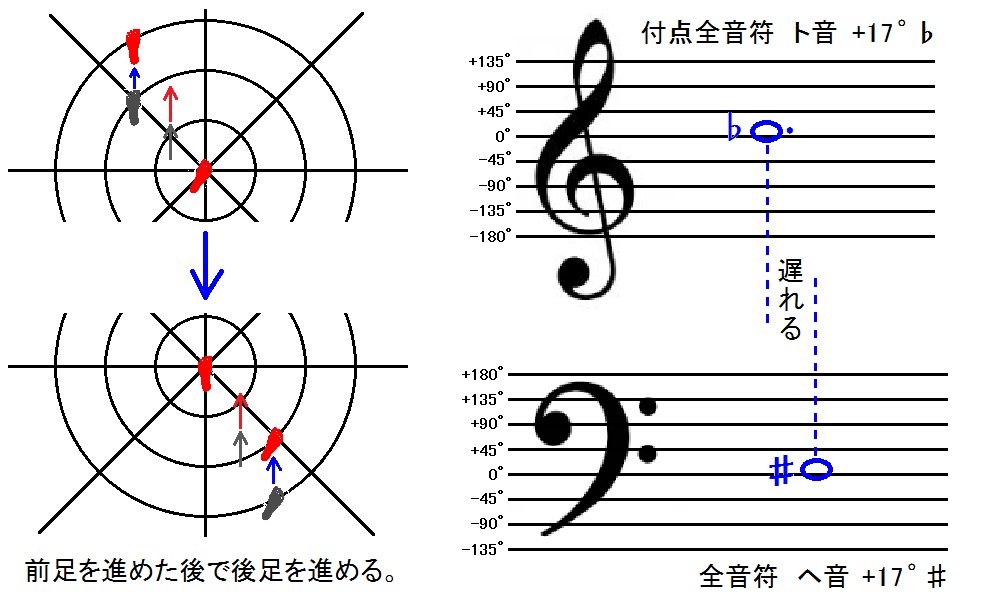 |
|
| バックステップ | 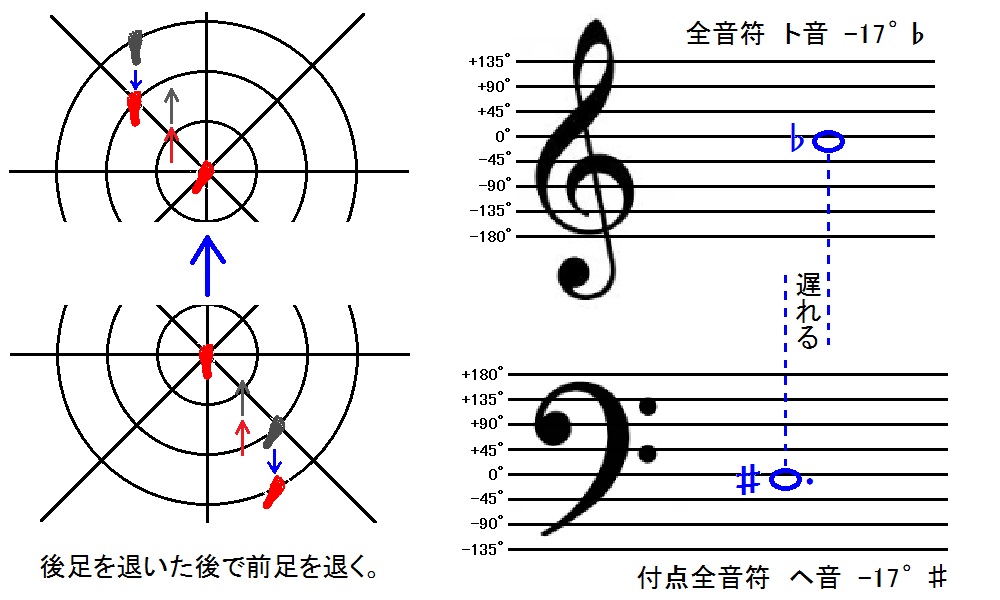 |
|
| 前足の側へ サイドステップ |
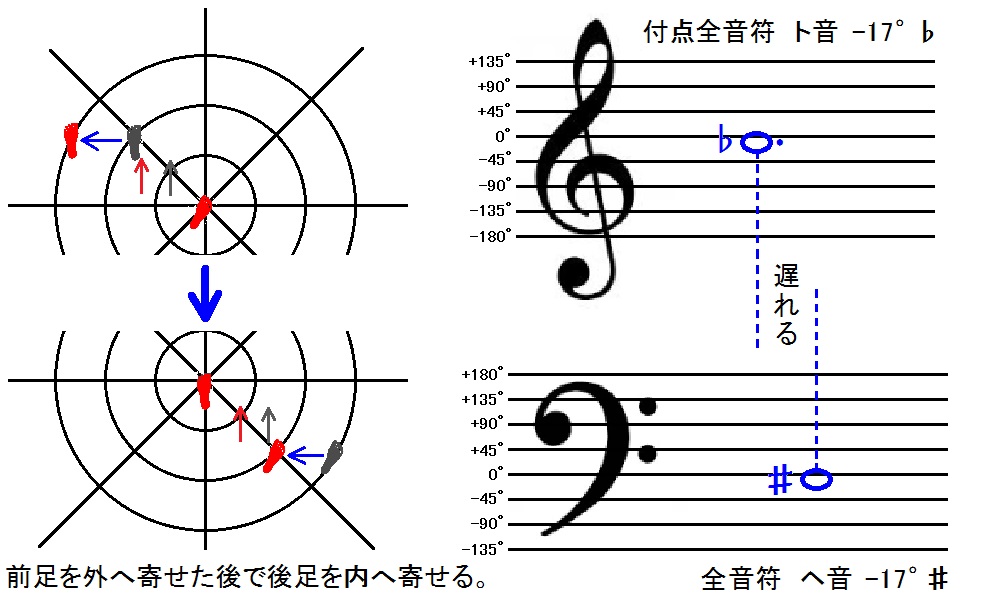 |
|
| 後足の側へ サイドステップ |
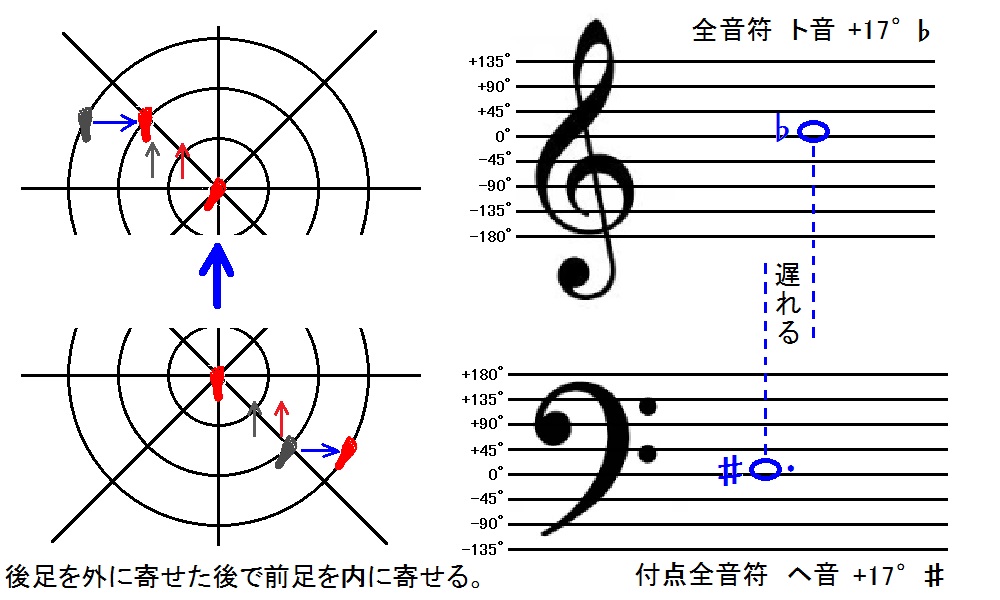 |
|
| 左右逆転 | 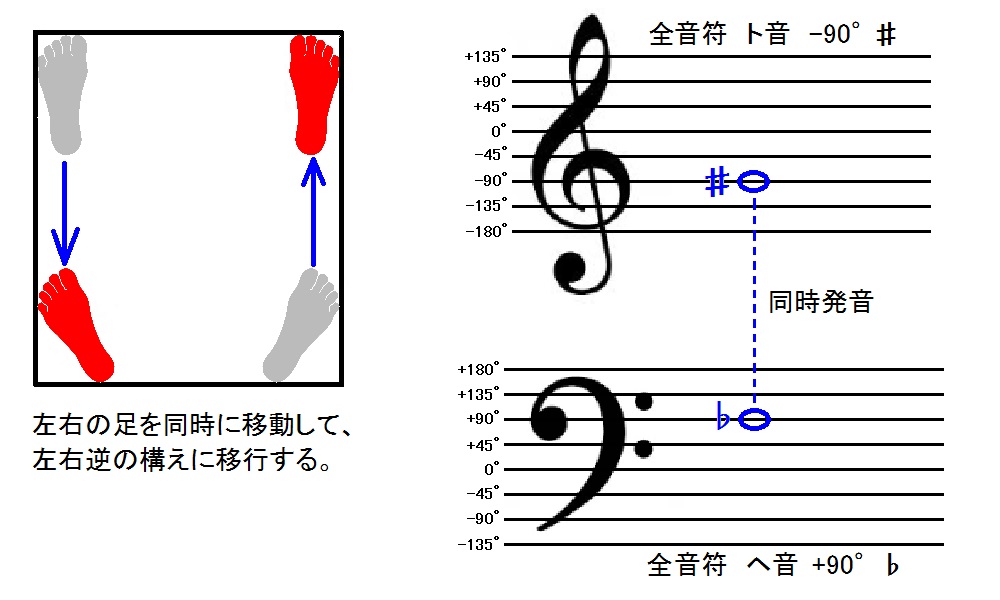 |
表記ルールへの変則 |
座標軸として極座標を用いての運足の把握、という発想は、高校時代に芦原空手の本から教えられた気がする。
網羅的に考え尽くそうとすれば必然的に出て来るアイデアでは有る。
AFSステップ専用音階(±180度を超える角についてはリーマン面に倣う)
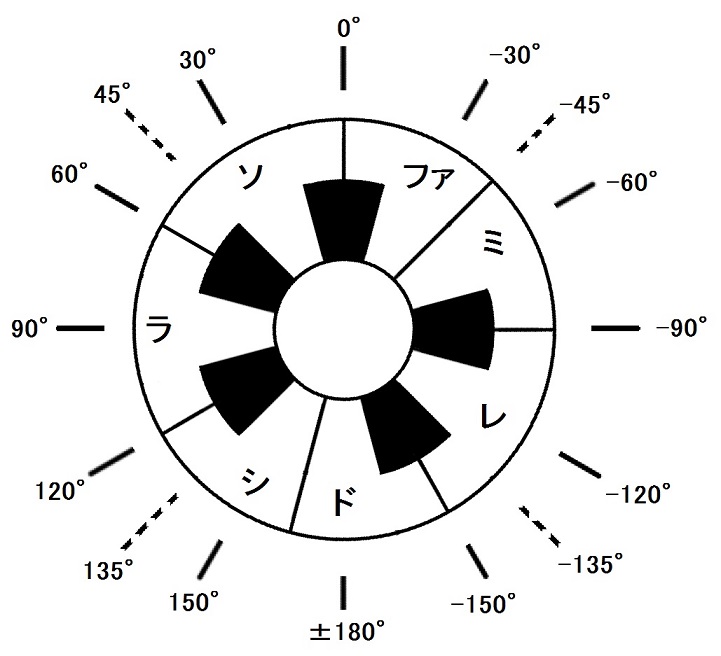
ホウシャノウ、キケン、タベタラ、シヌデ。
| 角度 | 階名 (数字は宇田による) |
鍵盤 | 周波数 | 音声ファイル |
| +180° | ド(1) | 白鍵 | 440Hz × 2^[(180-90)÷360]≒523.25Hz | 523_25hz.wav |
| +150° | シ | 白鍵 | 440Hz × 2^[(150-90)÷360]≒493.88Hz | 493_88hz.wav |
| +135° | 8 | なし | 440Hz × 2^[(135-90)÷360]≒479.82Hz | 479_82hz.wav |
| +120° | - | 黒鍵 | 440Hz × 2^[(120-90)÷360]≒466.16Hz | 466_16hz.wav |
| +90° | ラ(7) | 白鍵 | 440.00Hz | 440_00hz.wav |
| +60° | - | 黒鍵 | 440Hz × 2^[(60-90)÷360]≒415.30Hz | 415_30hz.wav |
| +45° | 6 | なし | 440Hz × 2^[(45-90)÷360]≒403.48Hz | 403_48hz.wav |
| +30° | ソ | 白鍵 | 440Hz × 2^[(30-90)÷360]≒392.00Hz | 392_00hz.wav |
| +16.9° | - | なし | 440Hz × 2^[(16.9-90)÷360]≒382.23Hz | 382_23hz.wav |
| +7.9° | - | なし | 440Hz × 2^[(7.9-90)÷360]≒375.67Hz | 375_67hz.wav |
| +6.5° | - | なし | 440Hz × 2^[(6.5-90)÷360]≒374.65Hz | 374_65hz.wav |
| 0° | 5 | 黒鍵 | 440Hz × 2^[(0-90)÷360]≒369.99Hz | 369_99hz.wav |
| -6.5° | - | なし | 440Hz × 2^[(-6.5-90)÷360]≒365.39Hz | 365_39hz.wav |
| -7.9° | - | なし | 440Hz × 2^[(-7.9-90)÷360]≒364.41Hz | 364_41hz.wav |
| -16.9° | - | なし | 440Hz × 2^[(-16.9-90)÷360]≒358.15Hz | 358_15hz.wav |
| -30° | ファ | 白鍵 | 440Hz × 2^[(-30-90)÷360]≒349.23Hz | 349_23hz.wav |
| -45° | 4 | なし | 440Hz × 2^[(-45-90)÷360]≒339.29Hz | 339_29hz.wav |
| -60° | ミ | 白鍵 | 440Hz × 2^[(-60-90)÷360]≒329.63Hz | 329_63hz.wav |
| -90° | 3 | 黒鍵 | 440Hz × 2^[(-90-90)÷360]≒311.13Hz | 311_13hz.wav |
| -120° | レ | 白鍵 | 440Hz × 2^[(-120-90)÷360]≒293.66Hz | 293_66hz.wav |
| -135° | 2 | なし | 440Hz × 2^[(-135-90)÷360]≒285.30Hz | 285_30hz.wav |
| -150° | - | 黒鍵 | 440Hz × 2^[(-150-90)÷360]≒277.18Hz | 277_18hz.wav |
| -162.5° | - | なし | 440Hz × 2^[(-162.5-90)÷360]≒270.59Hz | |
| -180° | ド(1) | 白鍵 | 440Hz × 2^[(-180-90)÷360]≒261.63Hz | 261_63hz.wav |
| +180° ↑ +150° ↑ +90° ↑ +30° ↑ -30° ↑ -60° ↑ -120° ↑ -180° |
ド ↑ シ ↑ ラ ↑ ソ ↑ ファ ↑ ミ ↑ レ ↑ ド |
白鍵 ↑ 白鍵 ↑ 白鍵 ↑ 白鍵 ↑ 白鍵 ↑ 白鍵 ↑ 白鍵 ↑ 白鍵 |
523.25Hz ↑ 493.88Hz ↑ 440.00Hz ↑ 392.00Hz ↑ 349.23Hz ↑ 329.63Hz ↑ 293.66Hz ↑ 261.63Hz |
dolemi.wav |
| +180° ↑ +135° ↑ +90° ↑ +45° ↑ 0° ↑ -45° ↑ -90° ↑ -135° ↑ -180° |
ド ↑ 8 ↑ ラ ↑ 6 ↑ 5 ↑ 4 ↑ 3 ↑ 2 ↑ ド |
白鍵 ↑ なし ↑ 白鍵 ↑ なし ↑ 黒鍵 ↑ なし ↑ 黒鍵 ↑ なし ↑ 白鍵 |
523.25Hz ↑ 479.82Hz ↑ 440.00Hz ↑ 403.48Hz ↑ 369.99Hz ↑ 339.29Hz ↑ 311.13Hz ↑ 285.30Hz ↑ 261.63Hz |
angle.wav |
したがって、45°刻みの音階を用いても、和音は結構綺麗に鳴るだろう。
AFS基本構えの足間隔を1とする時、AFS基本構えから前足を前方に長さで x だけ移動すれば、その移動は角度ではθであり、歩幅は y に成る。
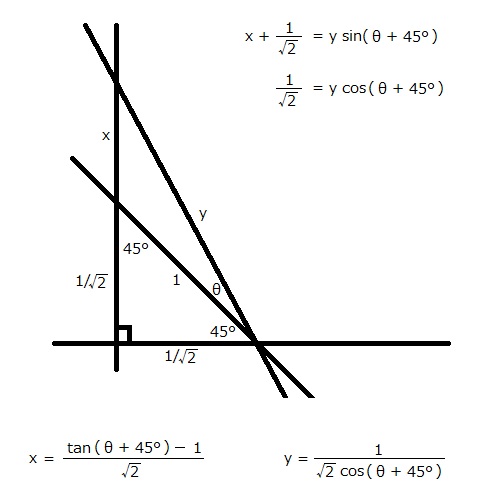 |
θ | x | y |
| 0.0 | 0 | 1 | |
| ・ ・ ・ |
|||
| 6.5 | 0.18184827649 | ||
| 6.52 | 0.18248548839 (≒半足踏込幅0.182529・・・) |
1.13638655663 | |
| 6.53 | 0.18280430425 | ||
| 6.6 | 0.18503994402 | ||
| ・ ・ ・ |
|||
| 7.9 | 1.17224372945 | ||
| 7.94 | 0.22921394548 | 1.17332710835 (≒蹴足着地間隔1.1734・・・) |
|
| 7.95 | 1.17359835546 | ||
| 8.0 | 1.17495701168 | ||
| ・ ・ ・ |
|||
| 16.8 | 1.49636152083 | ||
| 16.9 | 0.6171865407 | 1.50125041295 (≒最大足間隔1.5) |
|
| 17.0 | 1.50617595875 | ||
| ・ ・ ・ |
|||
| 27.4 | 2.33854891911 | ||
| 27.5 | 1.53554941074 | 2.35149033491 (≒蹴足着地間隔の2倍2.3468・・・) |
|
| ・ ・ ・ |
イメージ
| 前足を移動 | 後足を移動 | |
| -180° | 後足に関して点対称の位置に | 前足に関して点対称の位置に |
| -135° | 後足の真後ろに | 前足の真横に |
| -90° | 真後ろに退いて逆構えに | 始点 - 前足 - 終点が直角 (狙う向きを90度変える) |
| -45° | 後足の真横に | 前足の真後ろに |
| 0° | - | - |
| +45° | 後足の真ん前に | 前足の真横に |
| +90° | 始点 - 後足 - 終点が直角 (狙う向きを90度変える) |
真ん前に出して逆構えに |
| +135° | 後足の真横に | 前足の真ん前に |
| +180° | 後足に関して点対称の位置に | 前足に関して点対称の位置に |
----
足の配置だけでなく胴体(足の爪先)の向きも指定する必要があるが、以下では、それが欠けている。
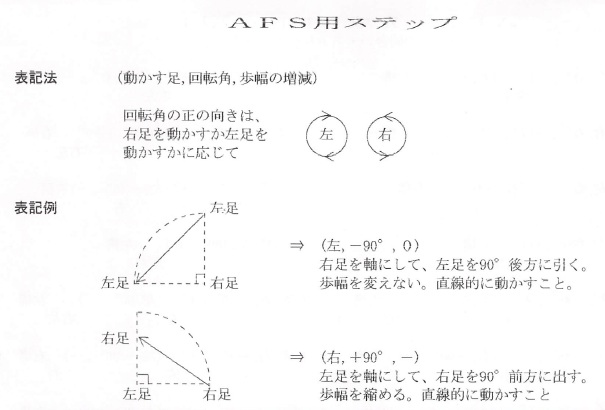

AFS用ステップ@空手の技@動画