since 2003
イレコナビ サイトマップ
ロボット歩兵の足脚は歩兵の歩兵たる所以だから、できるだけ人間の足脚に似せたい。
思うに人間の足脚は優秀だ。
戦車が通過できない地形や障害物を通過できる場合が多い。
オートバイと比較しても人間なら通過できるがオートバイには出来ない状況が幾つも有るだろう。
しかしヒトの足は、戦車やタイヤと比べて接地面積が小さく、地面を刺す様に踏むので、雪上歩行が困難な事から分かる様に、地面にめり込むという欠点を持っている。
ロボット歩兵の足の概略として私は以下のデザインを考案した。
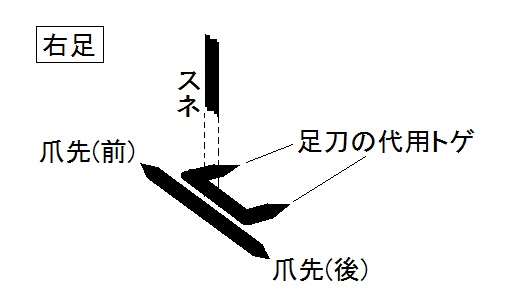
足首の関節をどうするかという問題が未解決だが、足首の関節としてはヒトの足首の関節と同等のフレキシブルさを実現する物として、スネに対する足の相対的な角は靭帯の張力を使ってコントロールしたい。
靭帯は金属のワイヤーか、またはハイテク素材のファイバーで作る。
ヒトの足首の可動性を活かした(ふくらはぎの筋力を使った)ジャンプを真似る為に、足の直線部分とコの字型部分は独立して動く様に設計する。
ヒトのカカトでの踏み付けに相当する動作は、足の直線部分をスネに平行に成るまで傾けて、爪先(前)または爪先(後)で真下に突き刺す動作です。
接地摩擦係数確保、磨耗防止、関節へのゴミの浸入の防止、これらの為にヒトの皮膚に相当する被覆を装備する必要が有るでしょう。
消耗交換の便を図る為に、靴を履かせる、という方式が合理的ではないか。